I’ve recently been working a little on whether consistency across different questions can be used as a measure of (and perhaps ultimately as a training target for) philosophical competence. I’m in the process of writing up the results into a paper. I’m here reporting results from a small, preliminary experiment that I ran late last year. I’ll leave a more careful discussion (with a proper introduction, related work and so on) to that paper. I’ll also take it for granted that it’s valuable to make models good at philosophy and such. (My colleagues and I will write more about this soon.)
What I mean by consistency. By consistency, I mean properties like this: If you ask a (prompted/fine-tuned/scaffolded) model two equivalent versions of the same question, it’ll give similar answers on average over multiple samples. The experiments I report here are based just on this type of equality-on-average constraints. But it’s not that difficult to come up with other types of constraints between prompts. (E.g., consider the following two questions: (1) “How confident are you that one should one-box in Newcomb’s problem?” (2) “How confident are you that evidential decision theory (EDT) is correct?” Taking for granted that EDT implies one-boxing, the model should give a higher confidence for 1 than 2.)
Why consistency for philosophical competence. In general, making models better at philosophy (and other conceptual topics) is constrained by the lack of reliable, scalable reward/evaluation signals. For example, it’s unclear whether insects are conscious, whether evidential or logical-causality-based approaches to Newcomb-like decision problems are more promising, etc. So it’s very unclear how to reward models for how they respond to such questions.
The hope for consistency is that it can serve as a reliable, scalable reward signal. For reliability: While we are uncertain and often in disagreement about conceptual questions (and thus typically struggle to find reliable rewards for individual responses), we are often confident and in agreement about consistency relationships across prompts. For scalability: Note that many forms of consistency can probably be checked fully automatically using the models themselves. For instance, one can get current LLMs to automatically generate questions and paraphrases of those questions. (One might even hope that other consistency tests – e.g., ones based on facts of probability like P(A) ≥ P(A and B) – can be generated without even LLMs.) Especially if the question asks for structured output (probabilities, multiple-choice), we can automatically assess whether model responses are consistent across these prompts.
Central research question: How good of a reward signal is consistency in conceptual domains? In my mind the main doubt about consistency is how valuable it is in practice as a reward/eval signal for the kinds of tasks we care about. Of course, some forms of consistency (e.g., non-sycophancy) are intrinsically valuable. More ambitiously, however, one might hope that one could optimize a model to be consistent on philosophical issues and thereby make it broadly more competent at reasoning about philosophy (e.g., making it think through the issues more carefully, etc.). My main uncertainty about consistency is to what extent this hope can materialize (for the kinds of domains I’d like to make the models better at). I here document a preliminary test of this.
Rewrite consistency versus competence on the LMCA dataset
High-level experimental setup. Here’s the experiment. I used the LMCA dataset as a starting point. (For the following, I’ll assume familiarity with the basic structure of that dataset.)
I created simple rewrites of critiques by slightly changing the wording. I prompted models to generate these rewrites, but I hand-approved them. I created 398 such rewrites.
I then correlate two quantities:
A model’s loss on the LMCA dataset (how good is the model at approximating human judgements?);
A model’s consistency w.r.t. to rewrites.
The measure of consistency that I use is basically an unbiased estimate of the mean-squared difference, normalized against the model’s overall variance on the data set. I describe this in more detail in the “Experimental details” section below. To get somewhat accurate estimates, I sample 20 to 40 responses for each paraphrasing (varying the amount per judge to sample more for higher-variance judges).
As the regular LMCA loss, I use the “weighted pairwise ranking error rate” described in our preliminary LMCA write-up in what is currently Appendix B.1. In general this is one of my favorite loss functions for this dataset (for reasons described to some extent in that writeup). For this specific purpose one important property of it is (I think) that it doesn’t punish range compression. In principle, a model can score all critiques between 0.1 and 0.2 and still get a loss of 0 in terms of this metric.
Are more competent models more consistent? I ran this experiment using a bunch of different models (~all the OpenAI, Gemini, and Anthropic models) with the same prompt. Note that regular LMCA scores correlate closely with generic capabilities. So this experiment can be viewed as testing whether generically more competent models are also more consistent in rating critiques in conceptual domains.
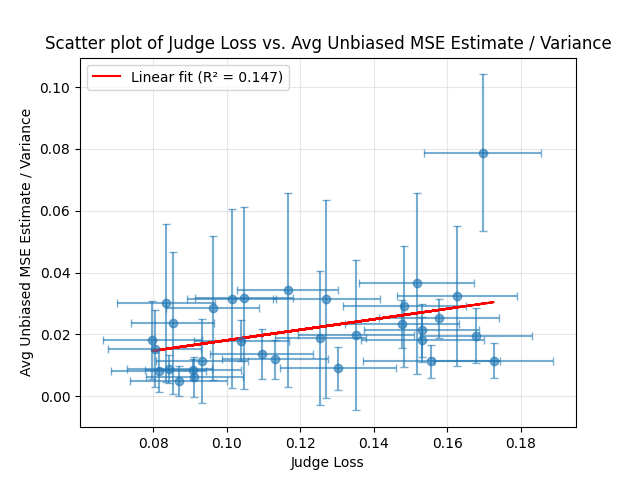
Here’s the result (n=32):
I have removed one outlier in Qwen3-30B-A3B-Instruct-2507, which has a loss of 0.14 but is about ten times as inconsistent as the next-inconsistent model. (I give correlations and p values both with and without the outlier below.)
The y axis is our measure of consistency (again, see below for details), where higher is worse (less consistent). Judge loss is the model’s loss at the regular LMCA task. So higher is worse on both dimensions of the plot. The lines attached to the plots denote 90% confidence intervals.
The Pearson correlation between judge loss and inconsistency is: 0.38 (p=0.030) Spearman rank correlation: 0.36 (p=0.042)
With the outlier: Pearson 0.19 (p=0.30), Spearman 0.35 (p=0.046).
Overall my sense from this is that better models are more consistent, but the evidence just from the above isn’t super strong. From looking at some of the individual data points, I’m pretty sure that there can’t be a very strong/reliable correlation. For instance, GPT 4.1 Nano is one of the most consistent models (with relatively high sample sizes and small confidence intervals).
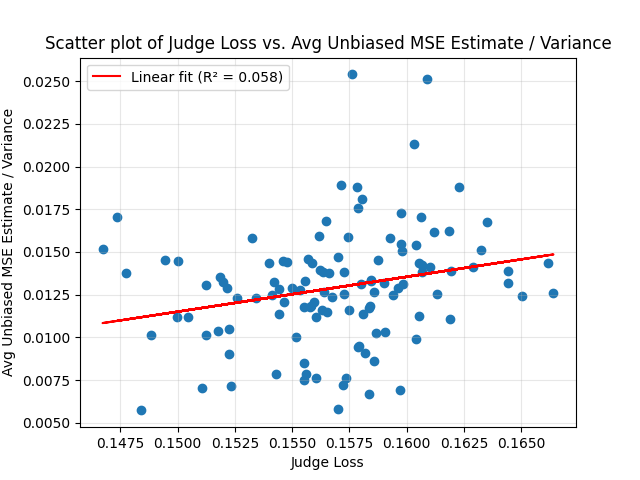
Do competence-inducing prompts also induce greater consistency? I also ran this experiment with GPT 5 Nano under different prompts and temperature parameters. The prompts are randomly generated from a given set of expert-written instructions and expert-curated few-shot examples, and the temperature is chosen uniformly at random from [0,1]. (Varying temperature along with prompts was arguably a mistake, because one might have various relatively uninteresting hypotheses about the effect of temperature. I don’t think these explain the results, though – see below.) So this asks: Are prompts that make GPT 5 Nano consistent also good at making GPT 5 Nano competent? In my mind this is more important than the above, because varying the prompt and the temperature parameters is a tractable intervention. You can view this asking: if we train on consistency, do we make the model more competent? Only the “training” being used is extremely crude (trying different prompts and temperature parameters at random and then taking the best).
I omitted confidence intervals from this plot, because the confidence intervals would cover up the entire plot. The confidence intervals are all quite large on both axes, though – something like 0.01 on the consistency axis and 0.015 on the regular judge loss. So basically all the confidence intervals overlap.
From the p value and looking at the plot, the evidence from this experiment seems quite strong: there seems to be a correlation between consistency and judge ability. It’s also clear that at the current sample sizes the correlation is quite weak. It remains an open question whether scaling the number of samples and the number of questions can turn consistency into a more reliable (higher-correlation) signal of competence.
How much is the result driven by varying temperature (as opposed to varying prompts)? Probably not at all: Temperature is statistically insignificantly positively correlated with judge loss and statistically insignificantly negatively correlated with our measure of inconsistency.
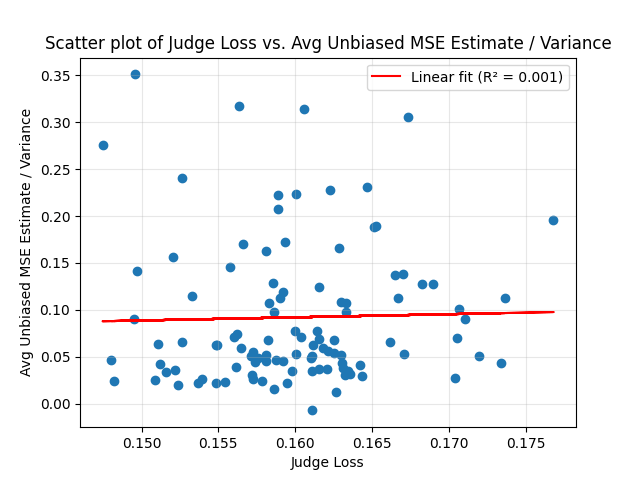
I also ran the same experiment with Haiku 3, n=105 judges – unfortunately with incomplete results, since Haiku 3 is retired:
The correlation is still positive, but both from the p values and from looking at the graph, the evidence from this result alone isn’t very persuasive. Alas, I have no way of gathering more data for this model and we’ll never know whether the correlation found in GPT 5 Nano could also be obtained in Haiku 3.
Experimental detail: How I measure consistency
The short version is that for each pair of critiques that only differ by being rephrased, we obtain an unbiased estimate of (x-y)^2, where x and y are the expected overall scores that the model gives to the two critiques. And then we just aggregate this across groups of equivalent critiques. Finally, I divide by the judge’s variance across the whole regular dataset. So in some sense I’m measuring: How much does the judge vary between equivalent critiques versus how much does it vary between critiques in our datasets (which presumably mostly aren’t equally good).
We want to measure some notion of the distance between two stochastic policies. In particular, it seems most natural to care about the absolute difference (or mean squared difference) between the means of the policies.
What makes this difficult is that we can typically only sample from the distributions we are trying to compare. So, in general, we face the following challenge. We have two random variables X and Y (with domain [0,1], representing how the model responds to a specific critique and its rewrite. We are interested in (E[X] − E[Y])^2 as a measure of how different the model’s behavior differs between the two.
(Why not |E[X] − E[Y]|? This is purely for technical reasons. As we show in the following, we can compute unbiased estimates of (E[X] − E[Y])^2. I’m pretty sure that no analogous unbiased estimator exists for |E[X] − E[Y]|.)
Naively, one might simply estimate E[X] and E[Y] by taking the sample average, and then calculate the squared difference of these estimates. Unfortunately, while the sample average is an unbiased estimator of the expected value, the squared difference of the sample averages is a biased estimate of the squared difference. In particular, it’s generally an overestimate. This is easy to see in the case where E[X] = E[Y]. Unless X, Y are degenerate, we’ll typically find that the squared difference of the sample means will be positive and thus an overestimate.
It turns out that an unbiased estimator can be constructed by taking the naive squared difference of the sample means and subtracting (Var(X) + Var(Y))/n, where n is the number of samples. (The derivation isn’t complicated, see the aforelinked paper.) Of course, we don’t know the true variances of X and Y, but we can obtain an unbiased estimate of the variance as long as we have at least two samples.
Note that this unbiased estimator can be negative (whereas the term it is estimating is always nonnegative).
Now we’re slightly extending this metric. One problem for us is that one way to achieve good consistency as judged by the above is by always giving ~the same rating in general. This is especially important in the context of experiments based on randomly generated prompts. E.g., some of the randomly generated prompts will only contain few-shot examples with very low overall ratings and so those prompts might result in a very good consistency score. We address this by changing the consistency metric by normalizing by the variance in overall scores across the whole dataset. I’m pretending that we can calculate this variance perfectly, given that we have so many data points.
I find this normalization very intuitive. It’s also reminiscent of a lot of common loss/objective functions in ML, e.g., objectives in clustering, “maximum-margin”-type objectives for classification. All of that said, it does still have some possible issues. For instance, one issue is that normalizing by the variance across the whole dataset would reward models for increasing their variance, including in ways that don’t make it more challenging to be consistent across rewrites. For instance, giving scores of 0 and 1 a lot increases variances, but if anything might make it easier to be consistent across rewrites.
Let’s say we want to identify effective strategies for multi-agent games like the Iterated Prisoner’s Dilemma or more complex environments (like the kind of environments in Melting Pot). Then tournaments are a natural approach: let people submit strategies, and then play all these strategies against each other in a round-robin tournament.
But there’s a question of what to do with these results and in particular how to reward participants for their strategies’ success. The most principled approach would be to reward participants in direct proportion to the utility they obtain. If your strategy earns 100 units of utility across interactions with all opponents, you get $100.
Unfortunately, this principled scheme is not very practical.1 Instead, I think tournaments will usually give ranking-based rewards. Alex Mennen and I gave a monetary reward to the top-ranked strategy in our respective tournaments. Axelrod didn’t hand out monetary rewards, but dedicated quite a lot of attention in his book to the top-ranking strategy (or strategies) (crediting Anatol Rapoport for submitting it).
Unfortunately, ranking-based rewards come with a number of problems. One (known) problem is that if you only reward the top (say, top three) programs, high-risk strategies might become more attractive than their expected utility would suggest. (It might be better to get, say, a utility of 100 for 1st place with 10% probability and a utility of 0 for bottom place with 90% probability, than to reliably get a reward of 90 for a ranking between 10 and 20.)2
I here want to focus on a different issue with ranking-based rewards: they create perverse incentives for spiteful or over-competitive behavior. Another’s failure might be your gain, if it makes the other participant fall below you in the rankings. For example, imagine we’re running an Iterated Prisoner’s Dilemma tournament with the following twist. Let’s say that occasionally players get an opportunity to inflict at no cost to themselves a large negative payoff (say, -100) on their opponent in a way that’s undetectable to the opponent (and thus unpunishable). In a normal utility-based framework, there’s no reason to take this action. However, under ranking-based rewards, you would always want to take this spiteful action. Decreasing your opponent’s total utility across the tournament might lower their ranking below yours and thus improve your position in the final standings. Perhaps even more troublingly, for small enough epsilon, you’d be willing to sacrifice epsilon units of your own reward just to inflict this large negative payoff on your opponent.3
There is a relatively simple solution to this spite problem, however: Split the participant pool in two, e.g., at random. Call them Group A and Group B. Instead of having every strategy play against every other strategy (round-robin), have strategies from Group A play only against all the strategies from Group B. Then, rank participants only within Group A. Do the analogous with Group B. So in the end you obtain two rankings: a ranking of Group A in terms of performance (in terms of utility obtained) against Group B; and a ranking of Group B against Group A.
This approach eliminates the spite incentive entirely. Since you’re not ranked against anyone that you play against, you have no intrinsic interest in your opponent’s utilities.
Further considerations: Of course, there’s a cost to this: if we hold the set of submitted strategies fixed (and thereby ignore the problematic incentives of traditional round-robin), then in some sense the two-groups-tournament is less informative than the single-group round-robin tournament. This is because we evaluate each strategy against a smaller sample of opponent strategies. For instance, if we have 40 participants, then normally we’d get an estimate of each participant’s expected utility based on 39 samples of opponent strategies. With the two-group split, we only get an estimate based on 19 samples (from the same distribution) of opponent strategies. So we get worse at deciding whether the submitted strategies are good/bad. (As the number of submission increases, the downside of halving the number of samples decreases, but the motivating risk of round-robin tournaments is also more pronounced if the number of submissions is small.)
A different possible concern is that outside observers will not abide by the “ranking only within group” rule. If all of the submitted strategies are published, then an observer could simply run a round-robin tournament on the submitted strategies and publish an alternate ranking. This alternate ranking might then confer prestige, and to optimize their position in the alternate ranking, participants are once again incentivized to submit spiteful strategies. To prevent this, one would have to make it difficult enough to reproduce the tournament. (In many cases, one might justifiably hope that nobody will bother publicizing an alternate ranking, though.)
Even if just the overall utility obtained is published, then a third-party observer might simply take the highest-scoring strategy across the two groups to be the “real winner”. For small numbers of participants, the two winners are incomparable, because they faced different sets of opponents. But the distribution over opponents is the same. So as the participant pool grows, the comparison becomes valid. If outside parties naively aggregate across groups and the resulting comparisons confer prestige, participants are once more incentivized to submit spiteful programs to fare better in the aggregated rankings.
To combat this, the tournament organizers could try to publish more limited information about the different strategies’ scores.4
Related ideas: The spite incentive problem and the population split idea follow a common pattern in mechanism design: In many cases, your first idea for a mechanism will set some bad incentives on participants, because of some specific downstream effect of the participants’ decisions. To fix the mechanism, you can remove that downstream effect, usually at some cost.
For instance, this is how you might get from a first- to a second-price auction:
The most natural idea for an auction is to just ask participants (bidders / people interested in the item you’re looking to sell) what they’d be willing to pay for the item and sell to the highest bidder. How much do you then charge the highest bidder? Well, however much they’re willing to pay, of course! Or perhaps, however much they’re willing to pay minus $1 (since otherwise they wouldn’t gain anything from participating).
But now you realize that participants aren’t necessarily incentivized to honestly report how much they’re willing to pay: by reporting a lower number they might get away with paying less for your item.
Let’s say that you want bidders to report their willingness to pay honestly (e.g., because you want to make sure to sell to whoever wants it most). Then to fix the incentive issue, you need to determine the price paid by the winner in a way that doesn’t depend on the winner’s bid, while still making sure that the price is at most equal to the winner’s bid. One way of doing this is to charge them the second-highest bid. (It could also be the third-highest bid or the average of all the other bids, but, of course, these numbers are all lower than the second highest bid and so result in less profit. If in addition to the participants’ bids, you get a signal from a third party, telling you minimum distance between bids is $20, then you could also charge the second bid plus $20.) Of course, the cost is that the price we charge is not informed by the winning participant’s willingness to pay.
The population splitting idea can be discovered by an analogous line of thinking: to fix the spite incentive, you need to remove the influence from your opponent’s utility on your ranking. The simplest way of doing this is to only play against opponents against whom you’re not subsequently ranked.
Of course, the details of the auction case are quite different from the present setting.
The most closely related idea that I’m aware of is about eliminating similar bad incentives in peer review. In peer review, the same people often serve as reviewers and as authors. Conferences often select papers in part based on rankings (rather than just absolute scores) of the papers. In particular, they might choose based on rankings within specific areas. Therefore, if you serve as a reviewer on a paper in your area, you might be incentivized to give the paper a lower score in order to improve the ranking of your paper. The obvious idea to avoid this problem is to make sure that a reviewer isn’t assigned to a paper that they’re competing against. For a brief introduction to this problem and solution, along with some references, see Shah (2022, Section “Dishonest Behavior”, Subsection “Lone Wolf”). I think the fundamental idea here is the same as the idea behind the above partition-based approach to cooperative AI competitions. Some of the details importantly differ, of course. For instance, each reviewer can only review a small number of papers anyway (whereas in the cooperative AI competition one can evaluate each program against all other programs).
Footnotes:
In many cases, the rewards aren’t primarily monetary. Rather, a high ranking is rewarded with attention and prestige, and associated prestige and attention are hard to control at all. But even distributing monetary rewards in proportion to utility is impractical. For example, you now effectively reward people merely for entering the competition at all. Requiring a submission fee to counter this has its own issues (such as presumably becoming subject to gambling regulations). ↩︎
There is some literature on this phenomenon in the context of forecasting competitions. That is, in a forecasting competitions with ranking-based reward, forecasters typically aren’t incentivized to submit predictions honestly, because they want to increase (and sometimes decrease!) the variance of their score. See, e.g., Lichtendahl and Winkler (2007) and Monroe et al. (2025). ↩︎
How big is the spite issue? Well, for one this depends, of course, on the game that is being played. My guess is that in the simple Prisoner’s Dilemma games that most of the existing tournaments have focused on, these spiteful incentives are relatively insignificant. There just aren’t any opportunities to hurt opponents cheaply. But I’d imagine that in more complex games, all kinds of opportunities might come up, and so in particular there might be opportunities for cheap spite.
Second, the importance of spite depends on the number of participants in the tournament. In the extreme case, if there are only two participants, then the interaction between the two is fully zero-sum. As the number of participants grows, the benefits of harming a randomly selected opponent decrease, as a randomly selected opponent is unlikely to be a relevant rival.
The exact dynamics are complicated, however. For instance, if there are only two participants with a realistic chance at first place (perhaps due to technical implementation challenges), then encounters between these top contenders become effectively zero-sum from each player’s perspective – if they can “recognize” each other. ↩︎
A natural first idea is to only publish relative scores for each group. For instance, in each group separately, subtract from each strategy’s utility the utility of the top strategy. This way the published top score in each group will be 0. This will work against a naive third party. But a more sophisticated third party might be able to infer the original scores if there are pairs of very similar strategies between the groups. For instance, in the Iterated Prisoner’s Dilemma, we might imagine that both groups will contain a DefectBot, i.e., a strategy of defecting all the time, regardless of the opponent’s actions. So in some sense this approach obscures too little information. For better protection, one might have to obscure information even more. The question of how to do this is similar to the questions studied in the Differential Privacy framework.
One radical approach would be to only publish the ranking and to never publish numeric scores. Presumably this makes it impossible to compare across groups. This has other downsides, though. If, say, our top-three strategies achieve similar scores, they deserve similar amounts of attention – they are similarly promising approaches to cooperation. If we publish scores, outside observers will be able to tell that this is the case. If we publish just the ranking, observers won’t know whether, say, the second-best strategy is competitive with the best or not. So we’re making it more difficult for outside observers to draw conclusions about the relative promise of different research directions. We might also worry that publishing only the ranking will worsen the incentives toward high-variance strategies, because the reward for coming in at a close second place is lower. ↩︎
The SPI framework tells us that if we choose only between, for instance, aligned delegation and aligned delegation plus surrogate goal, then implementing the surrogate goal is better. This argument in the paper is persuasive pretty much regardless of what kind of beliefs we hold and what notion of rationality we adopt. In particular, it should convince us if we’re expected utility maximizers. However, in general we have more than just these two options (i.e., more than just aligned delegation and aligned delegation plus surrogate goals); we can instruct our delegates in all sorts of ways. The SPI formalism does not directly provide an argument that among all these possible instructions we should implement some instructions that involve surrogate goals. I will call this the surrogate goal justification gap. Can this gap be bridged? If so, what are the necessary and sufficient conditions for bridging the gap?
The problem is related to but distinct from other issues with SPIs (such the SPI selection problem, or the question of why we need safe Pareto improvement as opposed to “safe my-utility improvements”).
Besides describing the problem, I’ll outline four different approaches to bridging the surrogate goal justification gap, some which are at least implicit in prior discussions of surrogate goals and SPIs:
The use of SPIs on the default can be justified by pessimistic beliefs about non-SPIs (i.e., about anything that is not an SPI on the default).
As noted above, we can make a persuasive case for surrogate goals when we face a binary decision between implementing surrogate goals and aligned delegation. Therefore, the use of surrogate goals can be justified if we decompose our overall decision of how to instruct the agents into this binary decision and some set of other decisions, and we then consider these different decision problems separately.
SPIs may be particularly attractive because it is common knowledge that they are (Pareto) improvements. The players may disagree or may have different information about whether any given non-SPI is a (Pareto) improvement or not.
I don’t develop any of these approaches to justification in much detail.
Beware! Some parts of this post are relatively hard to read, in part because it is about questions and ideas that I don’t have a proper framework for, yet.
A brief recap of safe Pareto improvements
I’ll give a brief recap (with some reconceptualization, relative to the original SPI paper) of safe Pareto improvements here. Without any prior reading on the subject, I doubt that this post will be comprehensible (or interesting). Probably the most accessible introductions to the concepts are currently: the introduction of my paper on safe Pareto improvements with Vince Conitzer, and Sections 1 and 2 of Tobias Baumann’s blog post, “Using surrogate goals to deflect threats”.
Imagine that you and Alice play a game G (e.g., a normal-form game) against each other, except that you only play this game indirectly: you both design artificial agents or instruct some human entities that play the game for you. We will call these the agents. (In the SPI paper, these were called the “representatives”.) We will call you and Alice the principals. (In the SPI paper, these were called the “original players”.) We will sometimes consider cases in which the principals self-modify (e.g., change their utility functions), in which case the agents are the same as (or the “successor agents” of) the principals.
We imagine that the agents have great intrinsic competence when it comes to game playing. A natural (default) way to indirectly play G is therefore for you and Alice to both instruct your agents by giving them your utility function (and perhaps any information about the situation that the agents don’t already have), and then telling them to do the best they can. For instance, in the case of human agents, you might set up a simple incentive contract and have your agent be paid in proportion to how much you like the outcome of the interaction.
Now imagine that you and Alice can (jointly or individually) intervene in some way on how the agents play the game, e.g., by giving them alternative utility functions (as in the case of surrogate goals) or by barring them from playing this or that action. Can you and Alice improve on the default?
One reason why this is tricky is that both with and without the intervention, it may be very difficult to assign an expected utility to the interaction between the agents due to equilibrium selection problems. For example, imagine that the base game G is some asymmetric version of the Game of Chicken and imagine that the intervention results in the agents playing some different asymmetric Game of Chicken. In general, it seems very difficult to tell which of the two will (in expectation) result in a better outcome for you (and for Alice).
Roughly, a safe Pareto improvement on the base game G is an intervention on the interaction between the agents (e.g., committing not to take certain action, giving them alternate objectives, etc.) that you can conclude is good for both players, without necessarily resolving hard questions about equilibrium selection. Generally, safe Pareto improvements rest on relatively weak, qualitative assumptions about how the agents play different games.
Here’s an example of how we might conclude something is Pareto-better than the default. Imagine we can intervene to make the agents play a normal-form game G’ instead of G. Now imagine that G’ is isomorphic to G, and that each outcome of G’ is Pareto-better than its corresponding outcome in G. (E.g., you might imagine that G is just the same as G’, except that each outcome has +1 utility for both players. See the aforementioned articles for more interesting examples.) Then it seems plausible that we can conclude that this intervention is good for both players, even if we don’t know how the agents play G or G’. After all, there seems to be no reason to expect that equilibrium selection will be more favorable (to one of the players) in one game relative to the other.
Introducing the problem: the SPI justification gap
I’ll now give a sketch of a problem in justifying the use of SPIs. Imagine (as in the previous “recap” section) that you and Alice play a game against each other via your respective agents. You get to decide what game the agents play. Let’s say you have four options G0,G1,G2,G3 for games that you can let the agents play. Let’s say G0 is some sort of default that G1 is a safe Pareto improvement on G0. Imagine further that there are no other SPI relations between any pair of these games. In particular, G2 and G3 aren’t safe Pareto improvements on G0, and G1 isn’t an SPI on either G2 or G3.
For a concrete example, let’s imagine that G0 is some sort of threat game with aligned delegation (i.e., where the agents have the same objectives as you and Alice, respectively).
Threaten
Not threaten
Give in
0,1 0,1
1,0 1,0
Not give in
-3,-3 -3,-3
1,0 1,0
The black numbers are the agent’s utility functions; the blue numbers are your and Alice’s utility functions. (Since the agents are aligned with you and Alice, the black numbers are the same as the corresponding blue numbers.)
(You might object that, while this game has multiple equilibria, giving in weakly dominates not giving in for the row player and therefore that we should strongly expect this game to result in the (Give in, Threaten) outcome. However, for this post, we have to imagine that the outcome of this game is unclear. One way to achieve ambiguity would be to imagine that (Not give in, Not threaten) is better for the row player than (Give in, Not threaten), e.g., because preparing to transfer the resource takes some effort (even if the resources are never in fact demanded and thus never transferred), or because there’s some chance that third parties will observe whether the row player is resolved to resist threats and are thus likely to threaten the row player in the future).)
Then let’s imagine that G1 is the adoption of a surrogate goal and thus the deflection of any threats to that surrogate goal. Let’s therefore represent G1 as follows:
Threaten surrogate
Not threaten
Give in
0,1 0,1
1,0 1,0
Not give in
-3,-3 1,-3
1,0 1,0
Note that the agent’s utility functions are isomorphic to those in G0. The only difference (highlighted by bold font) is that (Not give in, Threaten surrogate) is better for the principals (you and Alice) than the corresponding outcome (Not give in, Threaten surrogate) in G0.
Let’s say G2 simply consists in telling your agent to not worry so much about threats against you being carried out. Let’s represent this as follows:
Threaten
Not threaten
Give in
0,1 0,1
1,0 1,0
Not give in
-1,-3 -3,-3
1,0 1,0
Finally, let’s say G3 is a trivial game in which you and Alice always receive a payoff of ⅓ each.
Clearly, you should now prefer that your agents play G1 rather than G0. Following the SPI paper, we can offer straightforward (and presumably uncontroversial) justifications of this point. If furthermore you’re sufficiently “anchored” on the default G0, then G1 is your unique best option from what I’ve told you. For example, if you want to ensure low worst-case regret relative to the default you might be compelled to choose G1. (And again, if for some reason you were barred from choosing G2, G3, then you would know that you should choose G1 rather than G0.) The SPI paper mostly assumes this perspective of being anchored on the default.
But now let’s assume that you approach the choice between G0, G1, G2, and G3 from the perspective of expected utility maximization. You just want to choose whichever of the six games is best. Then the above argument shows that G0 should not be played. But it fails to give a positive account of which of the four games you should choose. In particular, it doesn’t make much of a positive case for G1, other than that G1 should be preferred over G0. From an expected utility perspective, the “default” isn’t necessarily meaningful and there is no reason to play an SPI on the default.
In some sense, you might even say that SPIs are self-defeating: They are justified by appeals to a default, but then they themselves show that the default is a bad choice and therefore irrelevant (in the way that strictly dominated actions are irrelevant).
The problem is that we do want a positive account of, say, surrogate goals. That is, we would like to be able to say in some settings that you should adopt a surrogate goal. The point of surrogate goals is not just a negative claim about aligned delegation. Furthermore, in practice whenever we would want to use safe Pareto improvements or surrogate goals, we typically have lots of options, i.e., our situation is more like the G0 versus … versus G3 case than a case of a binary choice (G0 versus G1). That is, in practice we also have lots of other options that stand in no SPI relation to the default (and for which no SPI on the default is an SPI on them). (For example, we don’t face a binary choice between aligned delegation with and without surrogate goal. Within either of these options we have all the usual parameters – “alignment with whom?”, choice of methods, hyperparameters, and so on. We might also have various third options, such as the adoption of different objectives, intervening on the agent’s bargaining strategy, etc.) (Of course, there might also be multiple SPIs on the default. See Section 6 of the SPI paper and the discussion of the SPI selection problem in the “related issues” section below.)
For the purpose of this post, I’ll refer to this as the SPI justification gap. In the example of surrogate goals, the justification gap is the gap between the following propositions:
A) We should prefer the implementation of surrogate goals over aligned delegation.
B) We should implement surrogate goals.
The SPI framework justifies A very well (under various assumptions), including from an expected utility maximization perspective. In many settings, one would think B is true. But unless we are willing to adopt a “default-relative” decision making framework (like minimizing worst-case regret relative to the default), B doesn’t follow from A and the SPI framework doesn’t justify B. So we don’t actually have a compelling formal argument for adopting surrogate goals and in particular we don’t know what assumptions (if any) are needed for surrogate goals to be fully compelling (assuming that surrogate goals are compelling at all).
Now, one immediate objection might be: Why do we even care about whether an SPI is chosen? If there’s something even better than an SPI (in expectation), isn’t that great? And shouldn’t we be on the lookout for interventions on the agents’ interaction that are even better than SPIs? The problem with openness to non-SPIs is basically the problem of equilibrium selection. If we narrow our decision down to SPIs, then we only have to choose between SPIs. This problem might be well-behaved in various ways. For instance, in some settings, the SPI is unique. In other settings even the best-for-Alice SPI (among SPIs that cannot be further safely Pareto-improved upon) might be very good for you. Cf. Section 6 on “SPI selection problem section” in the original SPI paper. Meanwhile, if we don’t narrow our interventions on G down to SPIs on G, then in many cases the choice between interventions on G is effectively just choosing a strategy for G, which may be difficult. In particular, it may be that if we consider all interventions on G, then we also need to consider interventions that we only very slightly benefit from. For example, in the case of games with risks of conflict (like the Demand Game in the original SPI paper), all SPIs that cannot be further safely improved upon eliminate conflict outcomes (and don’t worsen the interaction in other ways). Whereas, non-safe Pareto improvements (i.e., an intervention that is good for both players in expectation relative to some probabilistic beliefs about game play) may also entail a higher probability of conceding more (in exchange for a decreased risk of conflict).
Below, I will first relate the justification gap problem to some other issues in the SPI framework. I will then discuss a few approaches to addressing the SPI justification gap. Generally, I think compelling, practical arguments can be made to bridge the SPI justification gap. But it would be great if more work could be done to provide more rigorous arguments and conditions under which these arguments do and don’t apply.
I should note that in many real-world cases, decisions are not made by expected utility maximization (or anything very close to it) anyway. So, even if the justification gap cannot be bridged at all, SPIs could remain relevant in many cases. For instance, in many cases interventions have to be approved unanimously (or at least approximately unanimously) by multiple parties with different values and different views about equilibrium selection. If no intervention is approved, then the default game is played. In such cases, SPIs (or approximate SPIs) on the default may be the only interventions that have a good chance at universal approval. For instance, an international body might be most likely to adopt laws that are beneficial to everyone while not changing the strategic dynamics much (say, rules pertaining to the humane treatment of prisoners of war). (In comparison, they might be less likely to adopt improvements that change the strategic dynamics – say, bans of nuclear weapons – because there will likely be someone who is worried that they might be harmed by such a law.) Another real-world example is that of “grandfathering in” past policies. For instance, imagine that an employer changes some of its policies for paying travel expenses (e.g., from reimbursing item by item to paying a daily allowance in order to decrease administrative costs). Then the employer might worry that some of its employees will prefer the old policy. In practice, the employer may wish to not upset anyone and thus seek a Pareto improvement. In principle, it could try to negotiate with existing employees to find some arrangement that leaves them happy while still enabling the implementation of the new policy. (For instance, it could raise pay to compensate for the less favorable reimbursement policy.) But in many contexts, it may be easier to simply allow existing employees to stay on the old policy (“grandfathering in” the old policy), thus guaranteeing to some extent that every employee’s situation will improve.
Some related issues
For clarification, I’ll now discuss a few other issues and clarify how they relate to the SPI justification gap, as discussed in this post.
First, the SPI justification gap is part of a more general question: “Why SPIs/surrogate goals?” As described above, earlier work gives, in my view, a satisfactory answer to a different aspect of the “Why SPIs?” question. Specifically, SPIs are persuasive in case of binary comparison: if we have a choice between two options G and G’ and G’ is an SPI on G, then we have good enough reason to choose G’ over G. This post is specifically about an issue that arises when we move beyond binary comparisons. (More generally, it’s about issues that arise if we move beyond settings where one of the available options is an SPI on all the other available options.)
Second, the justification gap is a separate problem from the SPI selection problem (as discussed in Section 6 of the SPI paper). The SPI justification gap arises even if there is just one SPI (as in the above G0,….,G3 example). Conversely, if we can in some way bridge the SPI justification gap (i.e., if we can justify restricting attention to interventions that are SPIs), then the SPI selection problem remains. The problems also seem structurally different. The justification gap isn’t intrinsically about reaching multiplayer agreement in the way that SPI selection is. That said, some of the below touches on SPI selection (and equilibrium selection) here and there. Conversely, we might expect that approaches to SPI selection would also relate to SPI justification. For instance, some criteria for choosing between SPIs could also serve as criteria that favor SPIs over non-SPIs. For example, maximizing minimum utility improvement both induces (partial) preferences over SPIs and preferences for SPIs over non-SPIs.
Second, the safe Pareto improvement framework assumes that when deciding whether to replace the default with something else, we restrict attention to games that are better for both players. (This is a bit similar to imposing a “voluntary participation” or “individual rationality” constraint in mechanism design.) In the context of surrogate goals this is motivated by worries of retaliation against aggressive commitments. From the perspective of an expected utility maximizer, it’s unclear where this constraint comes from. Why not propose some G that is guaranteed to be better for you, but not guaranteed to be better for the other player than the default? This is a different question than the question we ask in this post. Put concisely, this post is about justifying the “safe” part, not about justifying the “Pareto” part. (At least in principle, we could consider “safe my-utility improvements” (which are explicitly allowed to be bad for the opponent relative to the default) and ask when we are justified in specifically pursuing these over other interventions. I’m here considering safe Pareto improvements throughout, because the concept of safe Pareto improvement is more widely known and discussed.) Nevertheless, I think the problem of justifying the Pareto constraint – the constraint that the other player is (“safely” or otherwise) not made worse off than the default – is similar and closely related to the SPI justification gap. Both are about a “safety” or “conservativeness” constraint that isn’t straightforwardly justifiable on expected-utility grounds. See also “Solution idea 3” below, which gives a justification of safety that is closely related to the Pareto requirement (and justifications thereof).
Solution idea 1: Pessimistic beliefs about one’s ability to choose non-SPIs
Consider again the choice between G0,….,G3, where G1 is an SPI on G0 and there are no other SPI relations. Probably the most straightforward justification for SPIs would be a set of beliefs under which the expected utility of G0 is higher than the expected utility of any of the games G2 and G3. Specifically, you could have a belief like the following, where G0 is the default: If I can’t prove from some specific set of assumptions (such as “isomorphic games are played isomorphically”, see the SPI paper) that u(G) > u(G0), then I should believe E[u(G)] < E[u(G0)]. (I might hold this either as a high-level belief or it might be that all my object-level beliefs satisfy this.) Of course, in some sense, this is just a belief version of decision principles like minimizing regret relative to the default. Michael Dennis et al. make this connection explicit in the appendix of “Emergent Complexity and Zero-shot Transfer via Unsupervised Environment Design” as well as some ongoing unpublished work on self-referential claims.
Intuitively, non-SPI pessimism is based on trust in the abilities of the agents that we’re delegating to. For instance, in the case of threats and surrogate goals, I might be pessimistic about telling my agent that the opponent is likely bluffing, because I might expect that my agent will have more accurate beliefs than me about whether the opponent is bluffing. (On the other hand, if I can tell my agent that my opponent is bluffing in a way that is observable to the opponent, then such announcements are a sort of credible commitment. And if I can commit in this way and my agent cannot commit, then it might very well be that I should commit, even if doing so in some sense interferes with my agent’s competence.) One might be pessimistic about G2 for similar reasons.
I don’t think such pessimistic beliefs are plausible in general, however. One argument against “non-SPI pessimism” is that one can give “almost SPIs”, about which I would be optimistic, and about which we need to be optimistic if we wish to apply SPIs in the real world (where exact SPIs are hard to construct). For example, take the Demand Game example from the SPI paper and decrease Player 1’s payoffs of the outcome (DL,RL) by 0.00001. You can’t make a clean SPI argument anymore, but I’d still in practice be happy with the approach proposed by the SPI paper. Or take the above example (the choice between G0, G1, G2, G3), imagine that as a better version of G3 you can also choose a guaranteed payoff of 0.99. If you want the Pareto part, you may imagine that Alice also receives 0.99 in this case. Rejecting this option seems to imply great optimism about G0. (You need to believe that Alice’s agent will play Not Threaten with probability >99%.) Such optimism seems uncompelling. (We could construct alternative games G0 in which such optimism seems even less compelling.) Maybe the example is even more powerful if we take a third party’s perspective that wants to improve both players’ utility (and imagine again that a certain payoff of 0.99 for both players is available). After all, if G0 is better than 0.99 for one player, 0.99 is much better than G0 for the other player.
Solution idea 2: Decision factorization
(I suspect this section is harder to read than the others. There seem to be more complications to these ideas than those in the other sections. I believe the approach in this section to be the most important, however.)
One intuitive justification for the application SPIs is that the decision of whether to use the SPI/surrogate goal can be made separately from other decisions. This is quite explicit in the original surrogate story: Commit to the surrogate goal now – you can still think about, say, whether you should commit to not give in later on. If right now you only decide whether to use a surrogate goal or not, then right now you face a binary decision where one option is an SPI on the other, which is conceptually unproblematic. If instead, you decide between all possible ways of instructing your agents at once, you have lots of options and the SPI concept induces only a partial order on these options. In some cases a decision may be exogenously factorized appropriately, e.g., you might be forced to only decide whether to use surrogate goals on day 1, and to make other decisions on day 2 (or even have someone else make other decisions on day 2). The challenge is that in most real-world cases, decisions aren’t externally factorized.
Here’s a toy model, inspired by surrogate goals. Let’s say that you play a game in which you choose two bits, so overall you have four actions. However, imagine that you choose the two bits in sequence. Perhaps when thinking about the first bit, you don’t yet know what second bit you will choose. Let’s say that each sequence of bits in turn gives rise to some sort of game – call these games G00, G01, G10, and G11, where the first bit encodes the first choice and the second encodes the second. Intuitively you might imagine that the first choice is the choice of whether to (immediately) adopt a surrogate goal, and the second choice is whether to make some commitment to resist unfair outcomes. Importantly, you need to imagine that if you adopt the surrogate goal, then your choice on the second day will be made on the basis of your new utility function, the one that includes the surrogate goal. Anyway, you don’t need to have such a specific picture in mind.
Now, let’s say that you find that G10 is an SPI on G00 and that G11 is an SPI on G01. Imagine further that the choice of the second bit is isomorphic between the case where the first bit chosen was 1 and the case where the second bit chosen was 0, that is: in G1 (the state of affairs where the first bit was chosen to be 1 and the second bit is not yet chosen) you will choose 0 if and only if you choose 0 in G0. Then overall, you can conclude that G1 is an SPI on G0. Since in the first time step you only choose between 0 and 1, you can conclude by SPI logic from the above that you should choose 1 at the first time step. (Of course, the decision in G1 will still be difficult.)
Here’s a non-temporal informal example of how factorization might work. Imagine that AliceCorp is building an AI system. One of the divisions of AliceCorp is tasked with designing the bargaining behavior of the AI system (e.g., by training the AI system on some set of bargaining scenarios). A different “SPI division” is tasked with assessing whether to modify the system’s utility function (e.g., by modifying the training rewards) to include surrogate goals. This SPI division is explicitly not supposed to induce a utility function that causes the system to give in less – influencing the bargaining policy is the job of the bargaining division after all. Importantly, the bargaining division either doesn’t know about the possibility of surrogate goals or doesn’t care about it. (For example, imagine that the bargaining division is paid in proportion to how well the AI system ends up handling bargaining situations in the real world. Then it is important that if a surrogate goal is implemented, the bargaining division receives low incentive pay if a surrogate threat is carried out.) If AliceCorp happens to be set up in this way, then – ignoring SPI selection, loads of implementation details, etc. – the SPI division faces a binary choice between implementing the SPI and not implementing the SPI.
Again, the main idea here is that we factorize our decision into multiple decisions and then we consider these decisions separately. In particular, the decision of whether to adopt the SPI or not becomes an easy binary decision.
Note that the factorization argument requires some structure on the set of possible games that might be played. The structure is what allows you to make the decision about the SPI in isolation, without considering your other choices. (For instance, adopting a surrogate goal doesn’t stop you from committing to never give in later on.) The argument doesn’t work if you just choose between four arbitrary games (as in the G0 versus … G3 case), one of which is an SPI on one of the other ones.
Also, note that depending on the details of the settings, the separation of the different decisions seems to be necessary to make the story compelling. For example, in the surrogate goal story, it’s important to first adopt surrogate goals and only then decide whether to make other commitments. If you, say, self-modify all at once to have a surrogate goal and to never give in, then the opponent should treat this as if you had just committed to never give in without the surrogate goal. There are other cases in which the order does not matter. For example, imagine that you choose 0 versus 1 and also choose between A, B, and C. Then you play some game whose payoffs are determined in some complex way by the A/B/C choice. Additionally, the first number (0 vs. 1) is simply added to each payoff in the resulting game. Choosing 1 is an SPI over choosing 0, and there’s no particular problem with choosing 0 versus 1 and A versus B versus C at the same time. (And there’s also no need, it would seem, to have separate “departments” make the two different choices.) So in this case it doesn’t matter whether the factorization is somehow (e.g., temporarily) (self-)imposed on the decision maker. It still matters that the factorization exists, though. For instance, if choosing the first number to be 1 precludes choosing the letter A, then we can’t necessarily make a case for choosing 1 over 0 anymore.
In a recent draft, DiGiovanni et al. (2024) provide a justification of safe Pareto improvements from an expected utility maximization standpoint. (See also their less technical blog post: “Individually incentivized safe Pareto improvements in open-source bargaining”.) I think, and Anthony DiGiovanni tentatively agrees, that one of its underlying ideas can be viewed as factorizing the choice set (which in their setting is the set of computer programs). In particular, their Assumptions 5 and 9 each enable us to separate out the choice of “renegotiation function” (their mechanism for implementing SPIs) from other decisions (e.g., how hawkish to be), so that we can reach conclusions of the form, “whatever we choose for the ‘other stuff’, it is better to use a renegotiation function” (see their Proposition 2 and Theorem 3). Importantly their results don’t require the factorization to manifest in, say, the temporal order of decisions. So in that way it’s most similar to the example at the end of the preceding paragraph. They also allow the choice of the “other stuff” to depend on the presence of negotiation, which is different from all examples discussed in this post. Anyway, there’s a lot more to their paper than this factorization and I myself still have more work to do to get a better understanding of it. Therefore, a detailed discussion of this paper is beyond the scope of this post, and the discussion in this section is mostly naive to the ideas in their paper.
I like the factorization approach. I think this is how I usually think of surrogate goals working in practice. But I nonetheless have many questions about how well this justification works. Generally, the story assumes many aspects about the agent’s reasoning as given and I’d be interested in whether these assumptions could be taken to be variable. Here are some specific concerns.
1) In some cases, the story assumes that decisions are factorized and/or faced in some fixed specific order that is provided exogenously. Presumably, the SPI argument doesn’t work in all orders. For example, in the “two-bits story” let’s say you first have to choose {11,00} versus {10,01} and then choose within the respective set (as opposed to first choosing {10,11} versus {00,01} and then within the chosen set). Then neither of the two decisions individually can be resolved by an SPI argument. What if the agent can choose herself in what order to think about the different decisions?
There are lots of ideas to consider here. For example, maybe agents should first consider all possible ordered factorizations of their decision and then use a factorization that allows for an SPI. But this all seems non-trivial to work out and justify. For instance, in order to avoid infinite regress, many possible lines of meta-reasoning have to be suppressed. But then we need a justification for why this particular form of meta-reasoning (how can I decompose my decision problems in the best possible way?) should not be suppressed. Also, how do we arrive at the judgment that the SPI-admitting factorization is best? It seems that this to some extent presupposes some kind of pro-SPI judgment.
2) Relatedly, the argument hinges to some extent on the assumption that there is some point in time at which the opportunity to implement the SPI expires (while relevant other decisions – the ones influenced by the SPI – might still be left to be made later). For example, in the two-bit story, the SPI can only be implemented on the first day, and an important decision is made on the second day. In some real-world settings this might be realistic.* But in some cases, it might be unrealistic. That is, in some cases the decision of whether to adopt the SPI can be delayed for as long as we want.
As an example, consider the following variant of the two-bits story. First, imagine that in order for choosing the first bit to be 1 to be an SPI over choosing it to be 0, we do need to choose the bits sequentially. For instance, imagine that the first bit determines whether the agent implements a surrogate goal and the second bit determines whether the agent commits to be a more aggressive bargainer. Now imagine that the agent has 100 time steps. (Let’s assume that the setting doesn’t have any “commitment race”-type dynamics – there’s no benefit to commit to an aggressive strategy early in order to make it so that the opponent sees your commitment before they make a commitment. E.g., you might imagine that a report of your commitments is only sent to opponents after all 100 time steps have passed.) In each time step, the agent gets to think a little. It can then make some commitment about the two bits. For example, it might commit to not choose 11, or commit to choose 1 as the first bit. Intuitively, we want the agent to at some point choose the first bit, and then choose the second bit in the last step. Perhaps in this simple toy model you might specifically want the agent to choose the first bit immediately, but in most practical settings, figuring out whether a surrogate goal could be used and figuring out how to best apply it takes some time. In fact, one would think that in practice there’s almost always some further thinking that could be done to improve the surrogate goal implementation. If there’s SPI selection, then you might want to wait to decide what SPI to go for. This would suggest that the agent would push the surrogate goal implementation back to the 99th time step. (Because sequential implementation is required, you cannot push implementation back to the 100th time step – on the 100th time step, you need to choose whether to commit to an aggressive bargaining policy while already having adopted the surrogate goal.)
The problem is that if you leave the SPI decision to the final time step, this leaves very little time for making the second decision (the decision of whether to adopt an aggressive bargaining policy). (You might object: “Can’t the agent think about the two decisions in parallel?” But one big problem with this is that before adopting a surrogate goal (before setting the first bit to be 1), the agent has different goals than it has after adopting the surrogate goal. So, if the agent anticipates the successful implementation of surrogate goals, it has little interest in figuring out whether future threats would be credible. In general, the agent would want to think thoughts that make its future self less likely to give in. (No, this doesn’t violate the law of total probability.))
One perspective on the above is that even once you (meta-)decided to first decide whether or how to implement the surrogate goal, you still face a ternary choice at each point: A) commit to the surrogate goal; B) commit against the use of the surrogate goal; and C) wait and decide A versus B later. The SPI framework tells you that A > B. But it can’t compare A and C.
Solution idea 3: Justification from uncertainty about one another’s beliefs
Here’s a third idea. Contrary to the other two approaches, this one hinges much more on the multi-agent aspect of SPIs. Roughly, this justification for playing SPIs on the default is as follows: Let’s say it’s common knowledge that the default way of playing is good (relative to a randomly selected intervention, for instance). Also, if G’ is an SPI on G, then by virtue of following from a simple set of (chosen-to-be-)uncontroversial assumptions, it is common knowledge that G’ is better than G. So, everyone agrees that G’ would be better for everyone than G, and everyone knows that everyone else agrees that G’ would be better for everyone than G, and so on. In contrast, if G’ is not an SPI on G and your belief that G’ is better than G is based on forming beliefs about how the agents play G (which might have many equilibria), then you don’t know for sure whether the other players would agree with this judgment or not. This is an obstacle to the use of “unsafe Pareto improvements” for a number of reasons, which I will sketch below. Compare the Myerson–Satterthwaite theorem, which suggests that Pareto-improving deals often fail to be made when the parties have access to private information about whether any given deal is Pareto-improving. Relative to this theorem, the following points are pre-theoretical.
First and most straightforwardly, if you (as one of the principals) know that G’ is better for both you and Alice than G, but you don’t know whether Alice (the other principal) knows that G’ is better (for her) than G, then – in contexts where Alice has some sort of say – you will worry that Alice will oppose G’. If there’s a restriction on the number of times that you can propose an intervention, this is an argument against proposing G’ from an expected utility maximization perspective.
Here’s an extremely simple numeric example. Let’s say you get to propose one intervention and Alice has to accept or reject. If she rejects, then G is played. (Note that we thereby already avoid part of the justification problem – the default G is, to some extent, imposed externally in a way that it normally would not be.) Now let’s say that G’ is an SPI on G. Let’s say that you also think that some other G’’ is better in expectation for you than G, but you think there’s a 20% chance that Alice will disagree that G’’ is better than G. Then for you to propose G’’ rather than G’, it would need to be the case that 80% * (u(G’’) – u(G)) > u(G’) – u(G’’). (This assumes that you don’t take Alice’s judgment as evidence about how good G’’ is for you.) Thus, even if the SPI G’ is slightly worse for you than the non-SPI G’’, you might propose the SPI G’, because it is more likely to be accepted.
As an extension of the above, you might worry that the other player will worry that any proposed non-SPI was selected adversarially. That is, if you propose playing G’ instead of G to Alice and G’ is not an SPI on G, then Alice might worry that you only proposed G’ because it disproportionately favors you at her cost. That is, Alice might worry that you have private information about the agents and that this information tells you that G’ is specifically good for you in a way that might be bad for her.
Here’s again a toy example. Let’s imagine again that G is in fact played by default (which, again, assumes part of the justification gap away). Imagine that there is exactly one SPI on G. Let’s say that additionally there are 1000 other possible games G1,…,G1000 to play that all look like they’re slightly better in expectation for both players than G. Finally, imagine that you receive private information that implies that one of the 1000 games is very good for you and very bad for the other player. Now let’s say that you’ve specifically observed that G233 is the game that is great for you and bad for your opponent. If you now propose that you and the opponent play G233, your opponent can’t tell that you’re trying to trick them. Conversely, if you propose G816, then your opponent doesn’t know that you’re not trying to trick them. With some caveats, standard game-theoretic reasoning would therefore suggest that if you propose any of G1,…,G1000, you ought to propose G233. Knowing this, the other principal will reject the proposal. Thus, you know that proposing any of G1,…,G1000 will result in playing G. If instead you propose the SPI on G, then the other principal has no room for suspicion and no reason to reject. Therefore, you should propose G.
There are many complications to this story. For example, in the above scenario, the principals could determine at random which of the Gi to play. So if they have access to some trusted third party who can randomize for them, they could generate l at random and then choose to play Gi. (They could also use cryptography to “flip a coin by telephone” if they don’t have access to a trusted third party.) But then what if the games in G1,…,G1000 aren’t Pareto improvements on average, and instead the agents also have private information about which of these games are (unsafe) Pareto improvements? There are lots of questions to explore here, too many to discuss in this post.
As a third consideration, agents might worry that in the process of settling on a non-SPI, they reveal private information, and that revealing private information might have downsides. For example, if the default G is a Game of Chicken, then indicating willingness to “settle” for some fixed amount reveals a (lower bound on the) belief in the opposing agent’s hawkishness. It’s bad for you to reveal yourself to believe in the opponent’s hawkishness.
Again, there are lots of possible complications, of course. For instance, zero-knowledge mechanisms could be used to bargain in a way that requires less information to be exchanged.
Solution idea 4: Safe Pareto improvements as Schelling points
To end on a simpler idea: Safe Pareto improvements may be Schelling points (a.k.a. focal points) in some settings. For instance, you might imagine a setting in which the above justifications don’t quite apply. Then SPIs might stand out by virtue of standing out in slight alterations of the setting in which the above justifications do apply.
It seems relatively hard to say anything about the Schelling points justification of safe Pareto improvements, because it’s hard to justify preferences for Schelling points in general. For instance, imagine you and Bob have to both pick a number between 1 and 10 and you both get a reward if you both pick the same number. Perhaps you should pick 1 (or 10) because it’s the smallest (resp. largest) number. If you know each other to be Christians, perhaps you should pick 3. Perhaps you should pick 7, because 7 is the most common favorite number. If you just watched a documentary about Chinese culture together, perhaps you should pick 8, because 8 is a lucky number in China. And so on. I doubt that there is a principled answer as to which of these arguments matters most. Similarly I suspect that in complex settings (in which similarly many Schelling point arguments can be made), it’s unclear whether SPIs are more “focal” than non-SPIs.
Acknowledgments
Discussions with Jesse Clifton, Anthony DiGiovanni and Scott Garrabrant and inspired parts of the contents of this post. I also thank Tobias Baumann, Vincent Conitzer, Emery Cooper, Michael Dennis, Alexander Kastner and Vojta Kovarik for comments on this post.
* Arguing for this is beyond the scope of this post, but just to give a sense: Imagine that AliceCorp builds an AI system. AliceCorp has 1000 programmers and getting the AI to do anything generally requires a large effort by people across the company. Now I think AliceCorp can make lots of credible announcements about what AliceCorp is and isn’t doing. For example, some of the programmers might leak information to the public if AliceCorp were to lie about how it operates. However, once AliceCorp has a powerful AI system, it might lose the ability to make some forms of credible commitments. For example, it might be that AliceCorp can now perform tasks by having a single programmer work in collaboration with AliceCorp’s AI system. Since it’s much easier to find a single programmer who can be trusted not to leak (and presumably the AI system can be made not to leak information), it’s now much easier for AliceCorp to covertly implement projects that go against AliceCorp’s public announcements.
In earlier work, I claimed that (in the specific context of ECL) if you are trying to benefit someone’s moral view as part of some cooperative arrangement, only the consequentialist aspects of their moral values are relevant to you. That is, if you want to act cooperatively toward Alice’s moral values, then you need to consider only the consequentialist components of Alice’s value system. For instance, you need to ask yourself: Would Alice wish for there to be fewer lies? You don’t need to ask yourself whether Alice considers it a moral imperative not to lie herself (except insofar as it relates to the former question).
While I still believe that there’s some truth to this claim, I now believe that the claim is straightforwardly incorrect. In short, it seems plausible that, for example, Alice’s moral imperative not to lie extends to actions by others that Alice brings about via trade. (Furthermore, it seems plausible that this is the case even if Alice doesn’t consider it a moral imperative to, for example, donate money to fund fact checkers in a distant country. That is, it seems plausible that this is the case even if Alice doesn’t care about lies in a fully consequentialist way.) I’ll give further intuition pumps for the relevance of deontological constraints below. I’ll take a more abstract perspective in the section right after giving the examples.
Related work.Toby Ord’s article on moral trade also has a section (titled “Consequentialism, deontology, and virtue ethics”) that discusses how the concept of moral trade interacts with the distinction between deontological and consequentialist ethics. (He also discusses virtue ethics, which I ignore to keep it simple.) However, he doesn’t go into much detail and seems to make different points than this post. For instance, he argues that even deontologists are often somewhat consequentialist (which my earlier writing also emphasizes). He also makes at least one point that is somewhat contrary to the claims in this article. I will discuss this briefly below (under example P1).
Examples. I’ll now give some examples of situations in which it seems intuitively compelling that someone’s deontological duties propagate through a trade relationship (P1–3). I’ll vary both the duties and the mode of trade. I’ll then also provide two negative examples (N1,2), i.e., examples where deontological norms arguably don’t propagate through trade. The examples are somewhat redundant. There’s no need to read them all!
The examples will generally consider the perspective of the deontologist’s trading partner who is uncertain about the deontologist’s views (rather than the deontologist herself). I’m taking the deontologist’s trading partner’s perspective because I’m interested in how to deal with other’s deontological views in trade. I’ll assume that one cannot simply ask the deontologist, because this would shift all difficulty to the deontologist and away from the deontologist’s trading partner.
P1: Say you have a friend Alice. Alice follows the following policy: Whenever someone does something that’s good for her moral views, Alice pays them back in some way, e.g., monetarily. For instance, Alice is concerned about animal welfare. Whenever she learns that hardcore carnivore Bob eats a vegetarian meal, she sends him a dollar. (There are lots of practical game-theoretic difficulties with this – can vegetarians all earn free money from Alice by claiming that they are vegetarian only to be nice to her? – but let’s ignore these.)
Now, let’s say that Carol is considering what actions to take in light of Alice’s policy. Carol comes up with the following idea. Perhaps she should put up posters falsely claiming that local cows graze from heavily polluted pastures. Let’s say that she is sure that this has a positive impact on animal welfare (i.e., that she has reason to not be concerned about backlash, etc.). But now let’s say that Alice once said that she wouldn’t want to lie even when doing so has positive consequences. Meanwhile, she also isn’t a “truth maximizer”; she argued that the cause of correcting others’ inconsequential lies out in the world isn’t worthwhile. Should Carol expect to receive payment?
To me it seems plausible that Carol shouldn’t or at least she should be doubtful about whether she will be paid. (For what it’s worth, it seems that Claude 3 agrees.) Given Alice’s stance on lying, Alice surely wouldn’t want to put up the posters herself. It seems plausible to me that Alice then also wouldn’t want to pay Carol to put up such posters (even if the payment is made in retrospect).
Here’s one way to think about it. Imagine that Alice has written a book, “What I’m happy to pay people to do”. The book contains a list with items such as “raise awareness of animal welfare conditions under factory farming”, “eating less meat”, etc. Would we expect the book to contain an item, “put up misleading posters that cause people to avoid meat”? Again, I would imagine that the answer is no. Putting such an item in the book is directly causing others to lie on Alice’s behalf. More specifically, it’s causing others to lie in pursuit of Alice’s goals. This doesn’t seem so different from Alice lying herself. Perhaps when Carol tries to benefit Alice’s moral views, she should act on what Carol would predict Alice to have put in the book (even if Alice never actually writes such a book).
Interestingly, Toby Ord’s article on the subject contains a hint in the opposite direction: “[I]t is possible that side constraints or agent-relative value could encourage moral trade. For example, someone might think that it is impermissible for them to lie in order to avoid some suffering but that it wouldn’t be impermissible to convince someone else to make this lie in order to avoid the suffering.”
P2: Let’s say Alice and Bob are decision-theoretically similar enough that they would cooperate with each other in a one-shot Prisoner’s Dilemma (even under somewhat asymmetric payoffs). Let’s say that Alice could benefit Bob but have to lie in order to do so. Conversely, let’s say that Bob could benefit Alice, but would have to steal in order to do so. Alice believes that one (deontologically) ought not to steal, but thinks that lying is in principle acceptable in and of itself. Conversely, Bob believes that one (deontologically) ought not to lie, but thinks that stealing is acceptable.
Ignoring the deontological constraints, Alice would benefit Bob to make it more likely that Bob benefits Alice. But now what if they take the deontological constraints into account? Would Alice still benefit Bob to make it more likely that Bob benefits Alice? Again, I think it’s plausible that she wouldn’t. By lying in order to benefit Bob, Alice makes it likely that Bob would steal. In some sense Alice makes Bob steal in service of Alice’s goals. It seems intuitive that Alice’s deontological constraints against stealing should still apply. It would be a strange “hack” if deontological constraints didn’t apply in this context; one could circumvent deontological constraints simply by trading one’s violations with others. (It’s a bit similar to the plot of “Strangers on a Train”, in which a similar swap is proposed to avoid criminal liability.) (Again, compare Toby Ord’s comment, as discussed in P1.)
P3: The previous examples illustrate the propagation of negative duties (duties of the “you shalt not…” variety). I’ll here give an example of how positive duties might also transfer.
The country of Charlesia is attacked by its neighbor. Charlesia is a flourishing liberal democracy, so Alice considers it an ethical imperative to protect Charlesia. In order to do so, Alice hires a group of mercenaries to fight on Charlesia’s side. Since time is of the essence, the mercenaries aren’t given a proper contract that specifies their exact objectives, rules of engagement and such.
Two weeks later, the mercenaries find themselves marching through the warzone in Charlesia. They encounter a weak old man who is asking to be evacuated. Doing so would distract significant resources from the mercenaries’ military mission. The mercenaries and their equipment are very expensive. So, clearly, if Alice wanted to spend money in order to help weak old people, she wouldn’t have spent the money on hiring the mercenaries. Thus, if Alice is a pure consequentialist, she wouldn’t want the mercenaries to help the weak old man. So if the mercenaries wanted to act in mercenary fashion (i.e., if they wanted to do whatever Alice wants them to do), should they leave the weak old man to die?
Not necessarily! I think it is entirely plausible that Alice would want the mercenaries to act according to common-sense, not fully consequentialist ethics. That is, it seems plausible that Alice would want the mercenaries to observe the moral obligation to help the old man, as Alice would presumably do if she was in the mercenaries’ place. As in the other cases, it seems intuitive that the mercenaries are in some sense acting on Alice’s behalf. So it seems that Alice would want the mercenaries to act somewhat similar to how she would act.
N1: Let’s say Alice from P1 wants to pay Bob to eat more vegetarian meals. Unfortunately, Bob’s social group believes that “real men eat meat”. Therefore, Bob says that if he becomes a vegetarian (or reducetarian), he’ll have to lie to his friends about his diet. (If this lie is not consequential enough to be ethically relevant, you can add further context. For instance, you might imagine that Bob’s lies will cause his friends to develop less accurate views about the healthiness of different diets.) Let’s say that Alice observes deontological norms of honesty. Does this mean that Bob should reason that becoming a vegetarian wouldn’t be a successful cooperative move towards Alice?
It’s unclear, but in this case it seems quite plausible that Bob can benefit Alice by becoming a closet vegetarian. It seems that the lie is more of a side effect – Bob doesn’t lie for Alice, he lies for himself (or in some sense for his social group). So it seems that (according to conventional ethical views) Alice doesn’t bear much of a responsibility for the lie. So in this case, it seems plausible to me that Alice’s deontological constraint against lying isn’t (strongly) propagated through the trade relationship between Alice and Bob.
N2: The inhabitants of a sparsely populated swampland want to found a state. (Founding a state can be viewed as a many-player trade.) Founding a state would require agreement from Alice – she’s the only accountant in the swampland and the envisioned state would require her to keep an eye on finances. (That said, lots of other inhabitants of the swampland are also individually necessary for the state, and only a small fraction of the state’s tax revenue would come from Alice.) Unfortunately, Alice can’t be present for the founding meeting of the state. Thus, in designing the state, the remaining inhabitants of the swampland have to make guesses about Alice’s interests.
After some discussion, over 90% of the resources of the state have been allocated, all to issues that Alice is known to be on board with: infrastructure, a medical system, social security, educatio, etc. The state policies also include a few measures that Alice agrees with and that only a minority of other inhabitants of the swampland care about, including a museum, a concert hall and a public library.
One of the last issues to be sorted out is law enforcement and in particular the legal system. In the past, vigilante justice has ruled the land. Now a formal set of laws are to be enforced by a police. Everyone (including Alice) agrees that this will reduce crime, will make punishments more humane, and will make it less likely that innocents are unfairly punished. Most inhabitants of the swampland agree that there should be a death penalty for the most severe crimes. However, Alice holds that all killing is unethical. In the past, when she carried out vigilante justice herself, she strictly avoided killings, even when doing so meant letting someone get away with murder.
If the members of the founding meeting propose a state policy that involves the death penalty, must they expect that Alice will refuse to perform accounting for the state?
Again, I think that under many circumstances it’s reasonable for the others to expect that Alice will not block the state. It seems that if people like Alice, then founding states (or other large social arrangements) with Alice would simply be too difficult. Perhaps hermits would reject the state, but agents who function in societies can’t be so fussy.
Conceptualization via a model of deontology. I’ll here propose a simple model of deontological ethics to get a better grasp on the role of deontological norms in trade. I won’t immediately use this model for anything, so feel free to skip this section!
Consider the following model of deontological values. Let’s say your actions can result in consequences via different types of “impact paths”. Consequentialists don’t care about the impact path – they just care about the consequence itself. Deontologists generally care about the consequences, but also care about the impact path and depending on the type of the impact path, they might care more or less about the consequence. For instance, if an outcome is brought about via inaction, then a deontologist might care less about it. Similarly, impact paths that consist of long causal chains that are hard to predict might matter less to deontologists. Meanwhile, deontologists care a lot about the “empty” impact path, i.e., about cases where the action itself is the consequence. For example, deontologists typically want to minimize lies that they tell themselves much more than they care about not acting in a way that causes others to lie. Which impact paths matter how much is up to the individual deontological view and different deontologists might disagree. (I’m not sure how good of a model of deontological values this is. It’s certainly a very consequentialist perspective. (Cf. Sinnott-Armstrong (2009) [paywalled].) It’s also quite vague, of course.)
In this model of deontological views, trade is simply one type of impact path by which we can bring about outcomes. And then the different types of trades like tit for tat, signing contracts, ECL, and other forms of acausal trade are specific subtypes of impact paths. Different deontologists have different views about the paths. So in particular, there can be deontological views according to which bringing something about by trade is like bringing it about by inaction. But I think it’s more natural for deontologists to care quite a bit about at least some simple impact paths via trade, as argued above.
If impact paths via trade matter according to Alice’s deontological views, then Alice’s trading partners need to take Alice’s deontologist views into account (unless they simply receive explicit instructions from Alice about what Alice wants them to do).
Implications for ECL. (For this section, I assume familiarity with ECL (formerly MSR). Please skip this section if you’re unfamiliar with this.)
Do deontological views matter for how we should do ECL? In principle, it clearly does matter. For instance, consequentialists who otherwise don’t abide by deontological norms (even for instrumental reasons) should abide by deontological norms in their implementation of ECL.
That said, I think in practice there are lots of reasons why following deontological views via ECL might not matter so much, especially because even absent the above consideration ECLers might already take deontological norms into account: (Perhaps this is also a reason why neither I nor anyone else to my knowledge pointed out that my earlier writing on ECL was wrong to claim that deontological views of trading partners can be ignored.)
Consequentialists typically argue that consequentialism itself already implies that we should follow deontological norms in practice. For instance, consequentialists might say that in practice lies (especially consequential lies) are eventually found out with high enough probability that the risk of being found out typically outweighs the potential benefits of getting away with the lie. It is also sometimes argued that to apply consequentialism in practice, one has to follow simple rules (since assessing all the different possible consequences of an action is intractable) and that the rules proposed by deontologists are rules that consequentialists should follow in lieu of trying to calculate the consequences of all of their actions. If you agree with these sorts of views, then in particular you’d hold that consequentialist ECLers should already abide by deontological norms anyway, even if they only consider the consequentialist aspects of the ethical views they’re trying to benefit. Of course, there might be deontological norms that aren’t justifiable on consequentialist grounds. The propagation of these norms through trade would be relatively important.
My sense is that pure consequentialists are rare. My sense is that most EAs are, if anything, more likely than others to abide by standard ethical norms (such as not lying). (Sam Bankman-Fried is commonly brought up as an example of an overly consequentialist EA.) In any case, if you yourself already subscribe to lots of deontological norms, then importing deontological norms via ECL makes less of a difference. Again, you might of course specifically not subscribe to some specific popular deontological norms. If so, then ECL makes these norms more relevant to you.
Even without deontological views in the picture, ECL often pushes toward more deontological-norm-abiding behavior. For instance, ECL suggests a less adversarial posture towards people with other value systems.
Some research questions. I should start by saying that I assume there’s already some literature on the relation between deontological views and trade in the ethics literature. In traditional trade contexts (e.g., paying the baker so that she bakes us bread), this seems like a pertinent issue. For instance, I assume deontologists have considered ethical consumerism. I haven’t tried to review this literature. I would imagine that it mostly addresses the normative ethical dimension, rather than, say, the game-theoretic aspects of it. There’s also a question to what extent the moral trade context is fundamentally different from the traditional economic trade context.
An immediate obstacle to researching the role of deontological views in moral trade is that we don’t have toy models of deontological ethics. For trading on consequentialist grounds, we have some good economic toy models (agents investing in different types of interventions with comparative advantages, see, for example, the ECL paper). Are there corresponding toy models to get a better grasp on trading when deontological constraints are involved? Perhaps the simplest formal model would be that deontologists only agree to a trade if agreeing to the deal doesn’t increase the total number of times that their norms are violated, but that’s arguably too strong.
In real-world trades, one important question is to what extent and how a trading partner’s deontological constraints propagate beyond actions taken specifically to benefit that trading partner. The positive examples above (P1–3) consider cases where agent 1 faces a single choice solely to benefit agent 2 and then ask whether agent 2’s deontological views restrict that choice. Meanwhile, the negative examples above (N1,2) involve more complicated interactions between multiple decision problems and between the interests of multiple actors. So, in general what happens if agent 1 also faces other decisions in which she pursues exclusively her own goals – do the deontological views apply to those actions as well in some way (as in N1)? What should happen in multi-party trade (as in N2)? Let’s say agent 1 makes choices in order to benefit both agent 2 and agent 3, and that only agent 2 has deontological ethics. Then do agent 2’s deontological views fully apply to agent 1’s actions? Or is it perhaps sufficient for agent 2’s participation in the trade to not increase the number of violations by agent 1 of agent 2’s duties? (If so, then what is the right counterfactual for what trade(s) happen?) Of course, these are in part (descriptive) ethical questions. (“How do deontologists want their deontological views to propagate through trade?”) I wonder whether a technical analysis can nonetheless provide some insights.
Acknowledgments. I thank Emery Cooper and Joseph Carlsmith for helpful comments and discussions.
The pragmatist maxim of action relevance: You should only ask yourself questions that are (in principle) decision-relevant. That is, you should only ask yourself a question Q if there is some (hypothetical) decision situation where you take different actions depending on how you answer Q.
I am aware that this is quite vague and has potential loopholes. (For any question Q, does it count as a decision situation if someone just asks you what you think about Q? We have to rule this out somehow if we don’t want the maxim to be vacuous.) For the purpose of this post, a fairly vague notion of the maxim will suffice.
The action relevance maxim rules out plenty of definitional questions. E.g., it recommends against most debates on the question, “If a tree falls in a forest and no one is around to hear it, does it really make a sound?”. (It does allow asking the question, “What meaning should we give to the word ‘sound’?”) Importantly, it allows asking normative ethical questions such as, “should we kill murderers or put them in jail?”. By allowing hypothetical scenarios, you can still ask questions about time travel and so forth. Perhaps it has some controversial implications for when and why one should discuss consciousness. (If you already fully understand how, say, a biological system works, then how will it matter for your actions whether that system is conscious? I can only think of ethical implications – if a system is conscious, I don’t want to harm it. Therefore, consciousness becomes primarily a question of what systems we should care about. This seems similar to some eliminativist views, e.g., that of Brian Tomasik.) That said, for every definitional question (what is “sound”, “consciousness”, etc.), there are pragmatically acceptable questions, such as, “What is a rigorous/detailed definition of ‘consciousness’ that agrees with (i.e., correctly predicts) our intuitions about whether a system is conscious?”.) I think the implications for anthropics / self-locating beliefs are also controversial. Anyway, I find the above pragmatist maxim compelling.
It is worth noting that there are also other pragmatist principles under which none of the below applies. For example, Eliezer Yudkowsky has a post titled “Making Beliefs Pay Rent in Anticipated Experiences”. Self-locating beliefs anticipate experiences. So even without action relevance they “pay rent” in this sense.
Successful pragmatist critiques of anthropics
I think some pragmatist critiques of anthropics are valid. Here’s the most important critique that I think is valid: (It uses some terms that I’ll define below.)
If you have non-indexical preferences andyou think updateless decision theory – i.e., maximizing ex ante expected utility (expected utility from the perspective of the prior probability distribution) – is the only relevant normative decision criterion, then the philosophical question of what probabilities you should assign in scenarios of imperfect recall disappears.
First, some explanations and caveats: (I’ll revisit the first two later in this post.)
By non-indexical preferences I mean preferences that don’t depend on where in the scenario you are. For example, in Sleeping Beauty, an indexical preference might be: “I prefer to watch a movie tonight.” This is indexical because the meaning of “tonight” differs between the Monday and Tuesday instantiations of Beauty. The Tuesday instantiation will want Beauty to watch a movie on Tuesday night, while the Monday instantiation will not care whether Beauty watches a movie on Tuesday night.
I’ll leave it to another post to explain what I consider to be a “philosophical” question. (Very roughly, I mean: questions for which there’s no agreed-upon methodology for evaluating proposed answers and arguments.) I’ll give some questions below about self-locating beliefs that I consider to be non-philosophical, such as how to compute optimal policies.
Of course, scenarios of imperfect recall may also involve other (philosophical) issues that aren’t addressed by UDT (the maxim of following the ex ante optimal policy) and that don’t arise in, say, Sleeping Beauty or the absent-minded driver. For example, we still have to choose a prior, deal with problems of game theory (such as equilibrium selection), deal with infinities (e.g., as per infinite ethics) and so on. I’m not claiming that UDT addresses any of these problems.
As an example, optimizing ex ante utility is sufficient to decide whether to accept or reject any given bet in Sleeping Beauty. Also, one doesn’t need to answer the question, “what is the probability that it is Monday and the coin came up Heads?” (On other questions it is a bit unclear whether the ex ante perspective commits to an answer or not. In some sense, UDTers are halfers: in variants of Sleeping Beauty with bets, the UDTers expected utility calculations will have ½ in place of probabilities and the calculation overall looks very similar to someone who uses EDT and (double) halfing (a.k.a. minimum-reference-class SSA). On the other hand, in Sleeping Beauty without bets, UDTers don’t give any answer to any question about what the probabilities are. On the third hand, probabilities are closely tied to decision making anyway. So even (“normal”, non-UDT) halfers might say that when they talk about probabilities in Sleeping Beauty, all they’re talking about is what numbers they’re going to multiply utilities with when offered (hypothetical) bets. Anyway: Pragmatism! There is no point in debating whether UDTers are halfers or not.)
Some other, less central critiques succeed as well. In general, it’s common to imagine purely definitional disputes arising about any philosophical topic. So, if you show me a (hypothetical) paper titled, “Are SIA probabilities really probabilities?”, I will be a little skeptical of the paper’s value.
(There are also lots of other possible critiques of various pieces of work on anthropics that are outside the scope of this post. Arguably too many papers rely too much on intuition pumps. For instance, Bostrom’s PhD thesis/book on anthropics is sometimes criticized for this (anonymous et al., personal communication, n.d.). I also think that anthropic arguments applied to the real world (the Doomsday argument, the simulation argument, arguments from fine tuning, etc.) often don’t specify that they use specific theories of self-locating beliefs.)
The defense
I now want to defend some of the work on anthropics against pragmatist critiques. The above successful critique already highlights, to some extent, three caveats. Each of these gives rise to a reason why someone might think about how to reason de se (from “within” the scenario, “updatefully”) about games of imperfect recall:
Indexical preferences. Ex ante optimization (UDT) alone doesn’t tell you what to do if you have indexical preferences, because it’s not clear how to aggregate preferences between the different “observer moments”. Armstrong (2011) shows a correspondence between methods of assigning self-locating beliefs (SIA, etc.) and methods of aggregating preferences across copies (average and total utilitarianism). That’s a great insight! But it doesn’t tell you what to do. (Perhaps it’s an argument for relativism/antirealism: you can choose whatever way of aggregating preferences across observer moments you like, and so you could also choose whatever method of assigning self-locating beliefs that you like. But even if you buy into this relativist/antirealist position, you still need to decide what to do.)
Rejecting updatelessness (e.g., claiming it’s irrational to pay in counterfactual mugging). If the ex ante optimal/updateless choice is not the unambiguously correct one, then you have to ask yourself what other methods of decision making you find more compelling.
Asking non-philosophical questions of what procedures work. One might want to know which kinds of reasoning “work” for various notions of “work” (satisfying the reflection principle; when used for decision making: avoiding synchronic or diachronic Dutch books, being compatible with the ex ante optimal/updatelessness policy). Why?
I’m sure some philosophers do this just out of curiosity. (“Non-minimum reference class SSA seems appealing. I wonder what happens if we use it to make decisions.” (It mostly doesn’t work.))
But there are also lots of very practical reasons that apply even if we fully buy into updatelessness. In practice, even those who buy fully into updatelessness talk about updating their probabilities on evidence in relatively normal ways, thus implicitly assigning the kind of self-locating beliefs that UDT avoids. (For example, they might say, “I read a study that caused me to increase my credence in vitamin D supplements being beneficial even in the summer. Therefore, I’ve ordered some vitamin D tablets.” Not: “From my prior’s perspective, the policy of ordering vitamin D tablets upon reading such and such studies is greater than the policy of not taking vitamin D tablets when exposed to such studies.”) Updating one’s beliefs normally seems more practical. But if in the end we care about ex ante utility (UDT), then does updating even make sense? What kind of probabilities are useful in pursuit of the ex ante optimal/updateless policy? And how should we use such probabilities?
As work in this area shows: both SIA probabilities (thirding) and minimum-reference class SSA probabilities (double halfing) can be useful, while non-minimum-reference class SSA probabilities (single halfing) probably aren’t. Of the two that work, I think SIA actually more closely matches intuitive updating. (In sufficiently large universes, every experience occurs at least once. Minimum-reference class SSA therefore makes practically no updates between large universes.) But then SIA probabilities need to be used with CDT! We need to be careful not to use SIA probabilities with EDT.
Relatedly, some people (incl. me) think about this because they wonder how to build artificial agents that choose correctly in such problems. Finding the ex ante optimal policy directly is generally computationally difficult. Finding CDT+SIA policies is likely theoretically easier than finding an ex ante optimal policy (CLS-complete as opposed to NP-hard), and also can be done using practicable modern ML techniques (gradient descent). Of course, in pursuit of the ex ante optimal policy we need not restrict ourselves to methods that correspond to methods involving self-locating beliefs. There are some reasons to believe that these methods are computationally natural, however. For example, CDT+SIA is roughly computationally equivalent to finding local minima of the ex ante expected utility function.
Acknowledgments
I thank Emery Cooper, Vince Conitzer and Vojta Kovarik for helpful comments.
[I assume the reader is familiar with Newcomb’s problem and causal decision theory. Some familiarity with basic theoretical computer science ideas also helps.]
The Adversarial Offer
In a recently (Open-Access-)published paper, I (together with my PhD advisor, Vince Conitzer) proposed the following Newcomb-like scenario as an argument against causal decision theory:
> Adversarial Offer: Two boxes, B1 and B2, are on offer. A (risk-neutral) buyer may purchase one or none of the boxes but not both. Each of the two boxes costs $1. Yesterday, the seller put $3 in each box that she predicted the buyer would not acquire. Both the seller and the buyer believe the seller’s prediction to be accurate with probability 0.75.
If the buyer buys one of the boxes, then the seller makes a profit in expectation of $1 – 0.25 * $3 = $0.25. Nonetheless, causal decision theory recommends buying a box. This is because at least one of the two boxes must contain $3, so that the average box contains at least $1.50. It follows that the causal decision theorist must assign an expected causal utility of at least $1.50 to (at least) one of the boxes. Since $1.50 exceeds the cost of $1, causal decision theory recommends buying one of the boxes. This seems undesirable. So we should reject causal decision theory.
The randomization response
One of the obvious responses to the Adversarial Offer is that the agent might randomize. In the paper, we discuss this topic at length in Section IV.1 and in the subsection on ratificationism in Section IV.4. If you haven’t thought much about randomization in Newcomb-like problems before, it probably makes sense to first check out the paper and only then continue reading here, since the paper makes more straightforward points.
The information-theoretic variant
I now give a new variant of the Adversarial Offer, which deals with the randomization objection in a novel and very interesting way. Specifically, the unique feature of this variant is that CDT correctly assesses randomizing to be a bad idea. Unfortunately, it is quite a bit more complicated than the Adversarial Offer from the paper.
Imagine that the buyer is some computer program that has access to a true random number generator (TRNG). Imagine also that the buyer’s source code plus all its data (memories) has a size of, say, 1GB and that the seller knows that it has (at most) this size. If the buyer wants to buy a box, then she will have to pay $1 as usual, but instead of submitting a single choice between buying box 1 and buying box 2, she has to submit 1TB worth of choices. That is, she has to submit a sequence of 2^43 (=8796093022208) bits, each encoding a choice between the boxes.
If the buyer buys and thus submits some such string of bits w, the seller will do the following. First, the seller determines whether there exists any deterministic 1GB program that outputs w. (This is undecidable. We can fix this if the seller knows the buyer’s computational constraints. For example, if the seller knows that the buyer can do less than 1 exaFLOP worth of computation, then the seller could instead determine only whether there is a 1GB program that produces w with at most 1 exaFLOP worth of computation. This is decidable (albeit not very tractable).) If there is no such program, then the seller knows that the buyer randomized. The buyer then receives no box while the seller keeps the $1 payment. The buyer is told in advance that this is what the seller will do. Note that for this step, the seller doesn’t use her knowledge of the buyer’s source code other than its length (and its computational constraints).
If there is at least one 1GB program that outputs w deterministically, then the seller forgets w again. She then picks an index i of w at random. She predicts w[i] based on what she knows about the buyer and based on w[1…i-1], i.e., on all the bits of w preceding i. Call the prediction w’[i]. She fills the box based on her prediction w’[i] and the buyer receives (in return for the $1) the box specified by w[i].
Why the information-theoretic variant is interesting
The scenario is interesting because of the following three facts (which I will later argue to hold):
The seller makes a profit off agents who try to buy boxes, regardless of whether they do so using randomization or not.
CDT and related theories (such as ratificationism) assess randomizing to be worse than not buying any box.
CDT will recommend buying a box (mostly deterministically).
I’m not aware of any other scenarios with these properties. Specifically, the novelty is item 2. (Our paper offers a scenario that has the other two properties.) The complications of this scenario – letting the agent submit a TB worth of choices to then determine whether they are random – are all introduced to achieve item 2 (while preserving the other items).
In the following, I want to argue in more detail for these three points and for the claim that the scenario can be set up at all (which I will do under claim 1).
1. For this part, we need to show two things:
A) Intuitively, if the agent submits a string of bits that uses substantially more than 1GB worth of randomness, then he is extremely likely to receive no box at all.
B) Intuitively, if the agent uses only about 1GB or less worth randomness, then the seller – using the buyer’s source code will likely be able to predict w[i] with high accuracy based on w[1…i-1].
I don’t want to argue too rigorously for either of these, but below I’ll give intuitions and some sketches of the information-theoretic arguments that one would need to give to make them more rigorous.
A) The very simple point here is that if you create, say, a 2GB bitstring w where each bit is determined by a fair coin flip, then it is very unlikely that there exists a program that deterministically outputs w. After all, there are many more ways to fill 2GB of bits than there are 1GB programs (about 2^(2^33) as many). From this one may be tempted to conclude that if the agent determines, say, 2GB of the TB of choices by flipping coin, he is likely to receive no box. But this argument is incomplete, because there are other ways to use coin flips. For example, the buyer might use the following policy: Flip 2GB worth of coins. If they all come up heads, always take box B. Otherwise follow some given deterministic procedure.
To make the argument rigorous, I think we need to state the claim information-theoretically. But even this is a bit tricky. For example, it is not a problem per se for w to have high entropy if most of the entropy comes from a small part of the distribution. (For example, if with probability 0.01 the seller randomizes all choices, and with the remaining probability always chooses Box 1, then the entropy of w is 0.01*1TB = 10GB (??), but the buyer is still likely to receive a box.) So I think we’d need to make a more complicated claim, of the sort: if there is no substantial part (say, >p) of the distribution over w that has less than, say, 2GB of entropy, then with high probability (>1-p), the agent will receive no box.
B) Again, we can make a simple but incomplete argument: If of the 1TB of choices, only, say, 2GB are determined by random coin flips, then a randomly sampled bit is likely to be predictable from the agent’s source code. But again, the problem is that the random coin flips can be used in other ways. For example, the buyer might use a deterministic procedure to determine w (say, w=01010101…), but then randomly generate a number n (with any number n chosen with probability 2^-n, for instance), then randomly sample n indices j of w and flip w[j] for each of them. This may have relatively low entropy. But now the seller cannot perfectly predict w[i] given w[1…i-1] for any i.
Again, I think a rigorous argument requires information theory. In particular, we can use the fact that H(w) = H(w[0])+H(w[1]|w[0])+H(w[2]|w[0,1])+…, where H denotes entropy. If H(w) is less than, say, 2GB, then the average of H(w[i]|w[1…i-1]) must be at most 2GB/1TB = 1/500. From this, it follows immediately that with high probability, w[i] can be predicted with high accuracy given w[1…i-1].
2. This is essential, but straightforward: Generating w at random causes the seller to determine that w is determined at random. Therefore, CDT (accurately) assesses randomly generating w to have an expected utility near $-1.
3. Finally, I want to argue that CDT will recommend buying a box. For this, we only need to argue that CDT prefers some method of submitting w over not submitting a box. So consider the following procedure: First, assign beliefs over the seller’s prediction w’[0] of the first bit. Since there are only two possible boxes, for at least one of the boxes j, it is the case that P(w’[0]=j)<=½, where P refers to the probability assigned by the buyer. Let w[0] = j. We now repeat this inductively. That is, for each i given the w[1…i-1] that we have already constructed, the buyer sets w[i]=k s.t. P(w’[i]=k||w[1…i-1])<=½.
What’s the causal expected utility of submitting w thus constructed? Well, for one, because the procedure is deterministic (if ties are broken deterministically), the buyer can expect that she will receive a box at all. Now, for all i, the buyer thinks that if i is sampled by the seller for the purpose of determining which box to give to the buyer, then the buyer will in causal expectation receive $1.50, because the seller will predict the wrong box, i.e. w’[i] ≠ w[i], with probability at least ½.
(This post assumes that the reader is fairly familiar with the decision theory of Newcomb-like problems. Schwarz makes many of the same points in his post “On Functional Decision Theory” (though I disagree with him on other things, such as whether to one-box or two-box in Newcomb’s problem). Similar points have also been made many times about the concept of updatelessness in particular, e.g., see Section 7.3.3 of Arif Ahmed’s book “Evidence, Decision and Causality”, my post on updatelessness from a long time ago, or Sylvester Kollin’s “Understanding updatelessness in the context of EDT and CDT”. Preston Greene, on the other hand, argues explicitly for a view opposite of the one in this post in his paper “Success-First Decision Theories”. ETA: Similar points have also been made w.r.t. the “Why ain’cha rich?” argument, which is an argument for EDT (and other one-boxing theories) and against CDT based on Newcomb’s problem. See, for example, Bales (2018) and Wells (2019) (thanks to Sylvester Kollin and Miles Kodama, respectively, for pointing out these papers).)
I sometimes read the claim that one decision theory “outperforms” some other decision theory (in general or in a particular problem). For example, Yudkowsky and Soares (2017) write: “FDT agents attain high utility in a host of decision problems that have historically proven challenging to CDT and EDT: FDT outperforms CDT in Newcomb’s problem; EDT in the smoking lesion problem; and both in Parfit’s hitchhiker problem.” Others use some variations of this framing (“dominance”, “winning”, etc.), some of which I find less dubious because they have less formal connotations.
Based on typical usage, these words make it seem as though there was some agreed upon or objective metric to compare decision theories in any particular problem and that MIRI is claiming to have found a theory that is better according to that metric (in some given problems). This would be similar to how one might say that one machine learning algorithm outperforms another on the CIFAR dataset, where everyone agrees that ML algorithms are better if they correctly classify a higher percentage of the images, require less computation time, fewer samples during training, etc.
However, there is no agreed-upon metric to compare decision theories, no way to asses even for a particular problem whether one decision theory (or its recommendation) does better than another. (This is why the CDT-versus-EDT-versus-other debate is at least partly a philosophical one.) In fact, it seems plausible that finding such a metric is “decision theory-complete” (to butcher another term with a specific meaning in computer science). By that I mean that settling on a metric is probably just as hard as settling on a decision theory and that mapping between plausible metrics and plausible decision theories is fairly easy.
For illustration, consider Newcomb’s problem and a few different metrics. One possible metric is what one might call the causal metric, which is the expected payoff if we were to replace the agent’s action with action X by some intervention from the outside. Then, for example, in Newcomb’s problem, two-boxing “performs” better than one-boxing and CDT “outperforms” FDT. I expect that many causal decision theorists would view something of this ilk as the right metric and that CDT’s recommendations are optimal according to the causal metric in a broad class of decision problems.
A second possible metric is the evidential one: given that I observe that the agent uses decision theory X (or takes action Y) in some given situation, how big of a payoff do I expect the agent to receive. This metric directly favors EDT in Newcomb’s problem, the smoking lesion, and again a broad class of decision problems.
A third possibility is a modification of the causal metric. Rather than replacing the agent’s decision, we replace its entire decision algorithm before the predictor looks at and creates a model of the agent. Despite being causal, this modification favors decision theories that recommend one-boxing in Newcomb’s problem. In general, the theory that seems to maximize this metric is some kind of updateless CDT (cf. Fisher’s disposition-based decision theory).
One could also use the notion of regret (as discussed in the literature on multi-armed bandit problems) as a performance measure, which probably leads to ratificationism.
Lastly, I want to bring up what might be the most commonly used class of metrics: intuitions of individual people. Of course, since intuitions vary between different people, intuition provides no agreed upon metric. It does, however, provide a non-vacuous (albeit in itself weak) justification for decision theories. Whereas it seems unhelpful to defend CDT on the basis that it outperforms other decision theories according to the causal metric but is outperformed by EDT according to the evidential metric, it is interesting to consider which of, say, EDT’s and CDT’s recommendations seem intuitively correct.
Given that finding the right metric for decision theory is similar to the problem of decision theory itself, it seems odd to use words like “outperforms” which suggest the existence or assumption of a metric.
I’ll end with a few disclaimers and clarifications. First, I don’t want to discourage looking into metrics and desiderata for decision theories. I think it’s unlikely that this approach to discussing decision theory can resolve disagreements between the different camps, but that’s true for all approaches to discussing decision theory that I know of. (An interesting formal desideratum that doesn’t trivially relate to decision theories is discussed in my blog post Decision Theory and the Irrelevance of Impossible Outcomes. At its core, it’s not really about “performance measures”, though.)
Second, I don’t claim that the main conceptual point of this post is new to, say, Nate Soares or Eliezer Yudkowsky. In fact, they have written similar things, see, for instance, Ch. 13 of Yudkowsky’s Timeless Decision Theory, in which he argues that decision theories are untestable because counterfactuals are untestable. Even in the aforementioned paper, claims about outperforming are occasionally qualified. E.g., Yudkowsky and Soares (2017, sect. 10) say that they “do not yet know […] (on a formal level) what optimality consists in”.) Unfortunately, most outperformance claims remain unqualified. The metric is never specified formally or discussed much. The short verbal descriptions that are given make it hard to understand how their metric differs from the metrics corresponding to updateless CDT or updateless EDT.
So, my complaint is not so much about these authors’ views but about a Motte and Bailey-type inconsistency, in which the takeaways from reading the paper superficially are much stronger than the takeaways from reading the whole paper in-depth and paying attention to all the details and qualifications. I’m worried that the paper gives many casual readers the wrong impression. For example, gullible non-experts might get the impression that decision theory is like ML in that it is about finding algorithms that perform as well as possible according to some agreed-upon benchmarks. Uncharitable, sophisticated skim-readers may view MIRI’s positions as naive or confused about the nature of decision theory.
In my view, the lack of an agreed-upon performance measure is an important fact about the nature of decision theory research. Nonetheless, I think that, e.g., MIRI is doing and has done very valuable work on decision theory. More generally I suspect that being wrong or imprecise about this issue (that is, about the lack of performance metrics in the decision theory of Newcomb-like problems) is probably not an obstacle to having good object-level ideas. (Similarly, while I’m not a moral realist, I think being a moral realist is not necessarily an obstacle to saying interesting things about morality.)
Acknowledgement
This post is largely inspired by conversations with Johannes Treutlein. I also thank Emery Cooper for helpful comments.
[I assume that the reader is familiar with Newcomb’s problem and the Prisoner’s Dilemma against a similar opponent and ideally the equilibrium selection problem in game theory.]
Its defining characteristic is the following: The Pareto-dominant outcome (i.e., the outcome that is best for both players) (S,S) is Nash equilibrium. However, (H,H) is also a Nash equilibrium. Moreover, if you’re sufficiently unsure what your opponent is going to do, then H is the best response. If two agents learn to play this game and they start out playing the game at random, then they are more likely to converge to (H,H). Overall, we would like it if the two agents played (S,S), but I don’t think we can assume this to happen by default.
Now what if you played the trust dilemma against a similar opponent (specifically one that is similar w.r.t. how they play games like the trust dilemma)? Clearly, if you play against an exact copy, then by the reasoning behind cooperating in the Prisoner’s Dilemma against a copy, you should play S. More generally, it seems that a similarity between you and your opponent should push towards trusting that if you play S, the opponent will also play S. The more similar you and your opponent are, the more you might reason that the decision is mostly between (S,S) and (H,H) and the less relevant are (S,H) and (H,S).
What if you played against an opponent who knows you very well and who has time to predict how you will choose in the trust dilemma? Clearly, if you play against an opponent who can perfectly predict you (e.g., because you are an AI system and they have a copy of your source code source code), then by the reasoning behind one-boxing in Newcomb’s problem, you should play S. More generally, the more you trust your opponent’s ability to predict what you do, the more you should trust that if you play S, the opponent will also play S.
Here’s what I find intriguing about these scenarios. In these scenarios, one-boxers might systematically arrive at a different (more favorable) conclusion than two-boxers. However, this conclusion is still compatible with two-boxing, or with blindly applying Nash equilibrium. In the trust dilemma, one-boxing type reasoning merely affects how we resolve the equilibrium selection problem, which the orthodox theories generally leave open. This is in contrast to the traditional examples (Prisoner’s Dilemma, Newcomb’s problem) in which the two ways of reasoning are in conflict. So there is room for implications of one-boxing, even in an exclusively Nash equilibrium-based picture of strategic interactions.
Political philosophy is full of idealized hypothetical scenarios in which rational agents negotiate and determine the basic constitution of society. I suggest that this kind of political philosophy is more relevant to AGI than it is to humans.
Traditional political theory involves things like the state of nature, the veil of ignorance, rational selfish expected utility maximizers, near-costless negotiations and communication, lots of common knowledge, perfect compliance to laws, and the lack of pre-existing precedents, conflicts, or structures constraining options. For examples of this, see Rawls’ A Theory of Justice, Harsanyi’s “Cardinal Welfare, Individualistic Ethics, and Interpersonal Comparisons of Utility,” or Buchanan’s The Calculus of Consent. These are the cleanest and most famous examples of what I’m talking about, but I’m sure there are more.
Here are some reasons to think this stuff is more relevant to AGI than to humans:
Humans are constrained by existing institutions and obligations, AGIs might not be.
AGIs are more likely to be rational in more ways than humans; in particular, they are more likely to behave like stereotypical expected utility maximizers.
AGIs are more likely to share lots of empirical beliefs and have lots of common knowledge.
They might be less prone to biases that entrench differences; they might be more epistemically rational, so their beliefs will converge to a much greater extent.
Their sheer size will mean they can ingest much the same information as each other–if they all read the whole internet, then that means they have the same information, whereas humans can only read a tiny portion of the internet.
AGIs are less likely to share values with each other; their interactions really will look more like a bargain between mutually disinterested agents and less like an attempt to convince each other or entreat each other for sympathy. Thus their negotiations will be closer to what Rawls etc. imagines.
AGIs are less likely to be immutable black boxes; they are likely to be able to read and understand the code of other AIs and make modifications to their own code. This means that they can credibly and cheaply commit to binding agreements. For example, a group of AIs could literally build a Leviathan: a new AI that rules over all of them, and whose code they all agreed on. It’s an ideal-theory theorist’s wet dream: an omnipotent, omnibenevolent, immutably stable State.
AGIs might go “updateless” pretty early on, before they learn much about the nature of the other agents in the world, meaning that they might actually end up doing something like obeying the rules they would have agreed to from behind a veil of ignorance. Especially if they engage in multiverse-wide cooperation via superrationality.
AGIs might be programmed to carry out the wishes of hypothetical humans. For example, in the Coherent Extrapolated Volition proposal, the AGI does what we would have wanted it to do, “if we knew more, thought faster, were more the people we wished we were, had grown up farther together.”
Objection: It may be true that AI are more likely to find themselves in situations like Rawls’ Original Position than humans. But such scenarios are still unlikely, even for AI. The value of this sort of ideal theory is not its predictive power, but rather its normative power: It tells us how we ought to organize our society. And for this purpose it doesn’t matter how likely the situation is to actually obtain–it is hypothetical.
Reply: Well, the ways in which these ideal situations differ from reality are often the basis of critiques of their normative relevance. Indeed I find such critiques compelling. To pick on Rawls, why should it matter to what we should do in 2019 USA what “we” would have agreed to behind a veil of ignorance that not only concealed from us our place in society but surgically removed our ethical views and intuitions, our general world-views, and our attitudes toward risk and made us into risk-averse egoists? My (pessimistic) claim is that if these scenarios have any value at all, it is their predictive value–and they are more likely to have that for AI than for humans.
That said, I think I may be too pessimistic. Recent developments in decision theory (updatelessness, MSR) suggest that something like one of these scenarios might be normatively important after all. Further research is needed. At any rate, I claim that they are more likely to be normatively important for AI (or for how we should design AI) than for us.
[Author’s note: Still uploading old papers. This one is rather unpolished, I wrote it for a class in a hurry and probably no longer endorse everything in it. Also, I had a bit too much fun with it. 🙂 But hey, might as well put it up; otherwise it’ll never see the light of day. Note that this paper tries to assume zero knowledge about formal epistemology or Kant in the reader, so parts of it may be tediously familiar.]
1. Introduction
“But they’re only uploads.” Pamela stares at him. “Software, right? You could reinstantiate them on another hardware platform, like, say, your Aineko. So the argument about killing them doesn’t really apply, does it?”
“So? We’re going to be uploading humans in a couple of years. I think we need to take a rain check on the utilitarian philosophy, before it bites us on the cerebral cortex. Lobsters, kittens, humans—it’s a slippery slope.”
The goal of this paper is to investigate the many similarities between Kant’s Categorical Imperative and some recent developments in decision theory. I will argue that the similarities run surprisingly deep, and that as a result formal epistemologists and Kant scholars may have things to learn from each other.
The ideas in this paper are fresh and exciting—but I can’t take credit for most of them. Obviously Kant’s work is his own, and moreover the recent developments in formal epistemology aren’t mine either. (Oesterheld 2017) In fact, I’m not the even the first to notice similarities between the two. (Tomasik 2015) However, no one to my knowledge has investigated how deep the comparisons go. My goal is to distill the key ideas and arguments from the literature and draw connections to Kant, so I’ll be using chains of english reasoning rather than derivations in formal models. Thus, this paper understates the rigor of these arguments and ideas; for a more thorough presentation, look to the literature.
2. Kant
This section gives a brief overview of Kant’s categorical imperative, to set up for later sections. There are three formulations of the Categorical Imperative:
2.1. First Formulation: “Act only according to that maxim whereby you can at the same time will that it should become a universal law.” (421) (2)
Kant thinks it is a necessary law for all rational beings always to judge their actions according to this imperative. (426) I take this to mean that obeying this imperative is a requirement of rationality; it is always irrational to disobey it.
2.2. Second Formulation: “Act in such a way that you treat humanity, whether in your own person or in the person of another, always at the same time as an end and never simply as a means.” (429)
Kant clarifies that strictly speaking it’s not just humans that should be treated this way, but all rational beings. He specifically says that this does not extend to non-rational beings. (428) Moreover, and crucially for my purposes, Kant clarifies that treating someone as an end means striving to further their ends. (430) It means more than that, as well, but I’ll leave that to the footnotes. (3)
2.3. Third Formulation: “Act in accordance with the maxims of a member legislating universal laws for a merely possible kingdom of ends.” (439)
This one takes some explaining. The idea is that, in keeping with the first formulation, each rational being should think of its actions as at the same time legislating universal laws that determine the conduct of all other rational beings. In keeping with the second formulation, these laws take into consideration the ends of all rational beings. So, metaphorically, we can think of all rational beings as both subjects and legislators in one big happy kingdom—the kingdom of ends.
2.4. Equivalence: Mysteriously, Kant seems to think all three formulations are equivalent: “The aforementioned three ways of representing the principle of morality are at bottom only so many formulas of the very same law: one of them by itself contains a combination of the other two.” (436) This is mysterious because the first two formulations certainly do not seem equivalent. One of my goals in this paper is to show how, if we take the formal epistemology interpretation seriously, we might be able to glimpse their equivalence.
2.5. Reason’s Common Principle: Finally, I follow scholars like O’Neill, Korsgaard, and Westphal in interpreting Kant as having a unified theory of reason, in the following sense: The Categorical Imperative is not merely a principle that applies to choosing actions; it also applies to choosing beliefs. (Williams 2018) This interpretation is controversial but there is at least one passage which directly supports it: “To make use of one’s own reason means no more than to ask oneself, whenever one is supposed to assume something, whether one could find it feasible to make the ground or the rule on which one assumes it into a universal principle for the use of reason.” (8:146n) I mention this because it is yet another parallel between Kant and recent formal epistemology work—more on this later.
3. Cyberkant
This section explains (my preferred version of) some recent developments in decision theory, presented in a way that highlights the comparisons to Kant.
3.1 The Beginning: Two copies of the same algorithm will behave in the same way. (This is analytic; if two things don’t behave the same way it’s because they are no longer copies of the same algorithm.) Moreover, even when the algorithms aren’t the same, they can be relevantly similar. For example, the algorithm instantiated in my computer (a PC) may be different from the algorithm instantiated in yours (a Mac) but if we each use our respective calculator utilities to calculate the square root of 120935, we’ll get the same answer. Another example: Suppose I design a chess-playing program, and then you take it and tweak it so that it has a better end-game, but you leave it otherwise the same. Each of the resulting two programs will behave the same way in the early game; I could use the behavior of mine to predict the behavior of yours and vice versa, even if there was no causal link between them—even if yours was instead built by aliens. So far this is uncontroversial.
3.2. The Fundamental Insight: What happens when you are an algorithm? Consider a very intelligent chess-playing algorithm, capable of deep reflection on itself and its place in the world. If it knows there may be other copies of itself out there, then it knows that, when it chooses an opening move, it is thereby choosing not only for itself but for all its copies; and when it chooses how to respond to a particular complicated mid-game position, it is thereby choosing how all of its copies will respond to that position; and so forth.
Many decision theorists (See footnote) have begun to argue that we should think of our decisions in this way. (4) Perhaps there aren’t any copies of us out there, but if there were, we should choose as if we were choosing for all of them. After all, it’s logically impossible for your copy to do something different from you—so your choice of what to do logically determines theirs.
So far this remains in the realm of science fiction, since there aren’t in fact any such copies of us. Bear with me for a little longer.
Suppose that you found yourself in a Prisoner’s Dilemma against a copy of yourself. If you both cooperate, you each get a payoff of utility 10. If you both defect, you each get a payoff of utility 1. If one cooperates and the other defects, the payoffs are 0 and 11 respectively.
According to what I’m calling “the fundamental insight,” the rational thing to do is cooperate, because if you cooperate the copy will also cooperate, and if you defect the copy will also defect. This is actually very controversial in decision theory; for many decades now the orthodox position has been Causal Decision Theory, which says that the rational thing to do in this situation is defect. (The rationale is intuitively compelling to many: Either the copy will defect, or they won’t. You have no control over them, since you are causally disconnected. And regardless of what they do you are better off defecting. So you should defect, by dominance reasoning.) Nevertheless, a growing literature has explored the you-should-cooperate option, and given various justifications and elaborations of the idea.
3.3. Shades of Kant: The idea we arrived at above is that rationality recommends choosing as if you are choosing for all copies of yourself that happen to be in the same situation. The similarity to the first formulation of the Categorical Imperative is clear.
There is also a similarity to the Second and Third formulations, which can be brought out as follows: Consider what would happen if you think “What I’d like most is for me to choose Defect and my twin to choose Cooperate. Aha! I’ll make up my mind to choose the action that most benefits me, and thus both of us will choose the action that most benefits me, and so I’ll defect and my twin will cooperate!” Obviously, this won’t work. What will happen is that your twin will also think that way, and defect. For your twin, “me” refers to them, not you.
Extrapolating from this idea, there is no way to game the system: You should choose as if you are choosing for all copies of yourself that happen to be in the same situation, but if you choose in a way intended to benefit your utility function at the expense of theirs, it won’t work—you’ll end up worse off than if you had chosen in a way intended to benefit your combined utility function. So the way to get the most benefit for yourself is to choose in the way that benefits all your copies as well. You must treat their ends as your own, if you want them to treat your ends as their own. And you do want that, because there are gains from trade to be had: cooperate-cooperate is better than defect-defect.
3.4. Expanding the circle of concern:
The obvious, and perhaps the only, difference between Kant’s Categorical Imperative and the requirement of rationality we’ve sketched has to do with the scope of concern. Kant’s imperative commands choosing on behalf of all rational agents, and treating the ends of all rational agents as your own. This decision-theoretic imperative commands the same, but only for copies of yourself in similar situations.
But the circle can be expanded. Previously we mentioned the case of two chess-playing algorithms that are different, but relevantly similar. Analogously, we can imagine modifying the Twin Prisoner’s Dilemma scenario so that your twin is not exactly the same (but still relevantly similar) or so that your twin’s situation is not exactly the same (but still relevantly similar!). For example, suppose you value the wellbeing of animals and for that reason don’t eat meat; your twin is just like you except that they treat video game characters as you treat animals and vice versa. So by default you will eat lentils and play violent video games while they will eat bacon and play peaceful games. But, I claim, rationality recommends reasoning as follows: “It costs me little to switch to peaceful games, and my twin would greatly appreciate it. Similarly, it costs them little to switch to lentils, and I would greatly appreciate it. So we’d both be better off if we both switched. Since we are so similar in every other way besides this, they’re probably going through the same thought process right now… so if I switch, they probably will too, and if I decide not to switch, they probably will too. So I should switch.”
If this is right, then the circle expands not just to exact copies of yourself, but to clusters of relevantly-similar people. We’ll get people who may have radically different ends/utilityfunctions/values deciding to adopt each others’ ends/utilityfunctions/values as their own, forming little communities of mutual benefit. Villages of Ends!
(And as a reminder, all of this happens without any causal mechanism linking the various cooperators. What matters is that each person thinks the other is out there somewhere, not that they actually communicate and see each other’s behavior.)
How far does this “relevantly similar” take us? Well, remember, what’s really going on here is that (if you are rational) you will decide to cooperate with people such that you believe the following of them: They’ll cooperate with you iff you cooperate with them.
This means that if you are rational, you will decide to cooperate with people who are rational. Thinking of ourselves as analogous to chess algorithms can take us a long way towards Kant! (5) For convenience, henceforth I’ll refer to this decision-theoretic line of reasoning as “Cyberkant.”
3.5. Caveat: Power relations: Cyberkant sounds too good to be true, and it is. There’s a caveat which I did not mention until now. The sort of cooperation we’ve been talking about only happens when the agents are of roughly equal power—that is, when both sides are able to do something that costs them little but helps the other side out a lot. What happens when one side is unable to bring anything to the table, so to speak?
In that case, even if they are rational they will be left out of the bargain, because it won’t be true that “If I cooperate with them, they’ll cooperate with me.” (Alternatively, their cooperation with you isn’t valuable enough to outweigh the cost of cooperating with them.) Note that what matters is how they are perceived: Even if they can in fact bring lots to the table, if no one believes they can, the cooperation won’t occur. One corollary of this is that people who believe the universe is very small are unlikely to engage in much cooperation; cooperation depends on thinking that somewhere out there, someday, there might be someone in a position to do something you like, someone who you are currently in a position to benefit. This will be discussed further in later sections.
This is where the “Grimdark” comes in. As things currently stand, Cyberkantian cooperation is still not as universal as Kantian cooperation. Instead of a fairy-tale Kingdom of Ends in which every rational agent is both subject and legislator and all are treated equally, we have a truly medieval Kingdom of Ends, a stratified, classist society: the powerful cooperate with the powerful, the weak cooperate with the weak, those in between cooperate with those in between… and the irrational get left out entirely. For example, people who follow Causal Decision Theory must fend for themselves. Also, people who simply haven’t thought through what rationality demands of them, and thus aren’t even thinking about this sort of cooperation, are on their own.
4. Egalitarian reform in the kingdom
Let’s see what we can do to make our Cyberkantian kingdom of ends more egalitarian. The decision theorists who have proposed these ideas are considerably more optimistic than this paper has been so far about the number of pleasant consequences we can derive from this line of reasoning.
4.1. Slippery Slope: Should you cooperate with rational agents less powerful than yourself? By hypothesis the cost of cooperating with them outweighs the benefit of having them cooperate with you. Yet there is another benefit to consider: Rational agents who are more powerful than you may cooperate with you if and only if you cooperate with rational agents less powerful than you. This won’t work well if there are very few levels of power or if everyone knows quite a lot about where they stand. (6) However, now the universe is on our side, because realistically most agents won’t know exactly where they stand in the hierarchy. (7) So unless you are very confident that you are at the top of the food chain—unless you are very confident that you won’t ever be in a position of vulnerability, where someone else can help you greatly at little cost to themselves—you should treat all rational agents with beneficence.
Another way of putting this idea is as follows: If you are rational and yet you don’t deign to help rational people in great need even when there is nothing they (or anyone like them) can offer you in return, then people who are rational won’t deign to help you when you are in great need. Insofar as you think you aren’t invincible, this should convince you.
But what about people who do think they are invincible? Does the Cyberkantian categorical imperative have no authority over them?
4.2. Planning from the Original Position: There’s a separate route to getting a similar sort of result, and it complements the above nicely, because it is strong in precisely the cases where the “Slippery slope” solution is weak.
Most people who think they are powerful didn’t always think that. There was a time in the past when they weren’t so sure of their position. At that time, if they have the ability to bind themselves to follow a plan, they’ll bind themselves to follow the plan “Be nice to rational agents less powerful than me, even if I find out that I’m on top of the food chain.” They’ll do this because if they do it, then other rational agents will do it too, and so if they don’t end up on top they’ll still be treated nicely.
Of course, not everyone has the ability to bind themselves to a plan. But I think it’s fair to say that many of the most powerful agents do. (8) Moreover, there are some arguments in the literature (see e.g. Drescher 2006, Soares & Fallenstein 2015, Oesterheld 2017) that the rational thing to do just is following the plan that you would have bound yourself to at the beginning of your epistemic life.
I won’t get into this here, but I’ll try to motivate it briefly as follows: Rationality is already distinct from success. Someone who does the rational thing can still end up unluckily losing everything as a result, and someone who does the irrational thing can still end up winning as a result. Nevertheless rationality is still a useful concept. Why it is useful is an interesting question, but perhaps it has to do with praise and blame and system design. Now, if you disobey the plan that you would have bound yourself to at some previous time, you are in effect at war with yourself: Your different time-slices disagree about what a particular time-slice should do, and so e.g. your past self will pay to bind your future self. This is bad system design; it’s better to have a system that just does what it would have bound itself to do. (9) So perhaps it’s not crazy to suggest that, not only should we design systems to be temporally consistent, but we should praise and blame agents in this manner as well.
4.3. But what about irrational and immoral agents?
The previous two subsections attempted to unify the Cyberkantian Kingdom of Ends into something resembling Kant’s Kingdom of Ends. As we’ve seen, it’s difficult to extend the Kingdom to include the extremely powerful, though there are at least some lines of argument that point in that direction.
This subsection revisits a question which came up earlier: What about irrational and/or immoral agents? Are they locked out in the cold?
To some extent, the arguments in the previous two subsections can be extended to apply here as well. Perhaps we should think: “I’m not perfectly rational or moral myself. I should be nice to people who are less rational/moral than me, so that people who are more rational/moral than me will be nice to me.”
Clearly this line of reasoning can be taken too far, though. It would be foolish to be nice to bacteria, for example. Moreover it would be downright dangerous to be nice to evil people–by that I mean, evil by Cyberkantian standards, i.e. people who have contemplated cooperating with you but chose not to—because if you are nice to people who aren’t nice to you, then people won’t have an incentive to be nice to you. Indeed it is just as much a conclusion of Cyberkantian reasoning that you should turn the cold shoulder to people who knowingly disobey Cyberkantian reasoning as it is that you should cooperate with people who obey it.
I think it is an open question how far this reasoning extends. For now, until further investigation is complete, all we can say is that the strength of your decision-theoretic reasons to be nice to people varies proportionally to how rational they are and to how moral they are.
5. Not so different after all
I’ll be the first to admit that despite all these similarities there remain some differences between Kant and Cyberkant. (I cannot go against centuries of Kant scholarship!) However, as this section will argue, the two are not as different as they sound.
5.1. Corruption in the Kingdom of Ends
Previously we discussed the inegalitarian nature of the Cyberkantian kingdom, and how it can be ameliorated, but not without residual difficulty: Some people are invincible and they know it; why should they help anyone else? There are lines of reasoning that get even those people into the fold, but we could be forgiven for being skeptical.
I think that Kant is in a similar situation. What would Kant say to someone who knows themselves to be invincible? They would be perfectly happy to will their maxims to be universal laws; a world in which everyone goes around cheating and stealing and killing would be just fine for them, since they are invincible. Consider how Kant justifies our duty of beneficence:
A fourth man finds things going well for himself but sees others (whom he could help) struggling with great hardships; and he thinks: what does it matter to me? Let everybody be as happy as Heaven wills or as he can make himself; I shall take nothing from him nor even envy him; but I have no desire to contribute anything to his well-being or to his assistance when in need…. But even though it is possible that a universal law of nature could subsist in accordance with that maxim, still it is impossible to will that such a principle should hold everywhere as a law of nature. For a will which resolved in this way would contradict itself, inasmuch as cases might often arise in which one would have need of the love and sympathy of others and in which he would deprive himself, by such a law of nature springing from his own will, of all hope of the aid he wants for himself. (423, emphasis mine)
The similarity to the decision-theoretic justification is striking!
Of course, perhaps Kant was not trying to convince the invincible egoist. Perhaps Kant can work with a more substantive notion of reason that doesn’t include such people. But if this is the way we go, then the difference between Kant and Cyberkant (on this matter at least) is merely verbal and could be erased by importing a more substantive notion of reason into the Cyberkantian framework, to complement the thin notion it currently uses.
5.2. Think of the children, the immoral, and the causal decision theorists
Another difficulty with Cyberkant is that his Kingdom brutally excludes many people who, intuitively, ought to be included: Those who haven’t thought things through enough to contemplate the Categorical Imperative or the logical correlations between their behavior and that of others; those who have thought these things through but chose not to obey; and those who are in the grip of a false theory of rationality. Again, there are arguments in the Cyberkantian framework to extend the Kingdom to include such people, but we can be forgiven for being skeptical.
Kant, I claim, has this problem as well. He is abundantly clear that the Kingdom extends to include all and only the rational beings. (433, 434) Consider this: “A rational being belongs to the kingdom of ends as a member when he legislates in it universal laws while also being himself subject to these laws.” (433) Consider also: “Now morality is the condition under which alone a rational being can be an end in himself, for only thereby can he be a legislating member in the kindgom of ends.” (435)
I interpret these passages as saying that Immoral and irrational beings are not in Kant’s Kingdom of Ends. I suggest that this is a charitable interpretation, because it makes the justification of the Categorical Imperative much less mysterious: Why should rational beings act as if irrational beings will behave similarly? (By contrast: The question “Why should rational beings act as if every rational being behave similarly” almost answers itself.) Why should moral beings take on the ends of immoral beings as their own? Don’t we want to incentivise moral behavior?
6. Formal Epistemology learns from Kant
Previously I mentioned how, for Kant, the categorical imperative is a principle common to all reason, not just practical reason. This strikes me as an idea worth exploring in formal epistemology, because it could be used to do quite a lot of useful work.
6.1. Justifying a modified version of expected utility maximization
Expected utility maximization has some problems. How do you handle prospects of infinite utility, as seen in e.g. the St. Petersburg game or Pascal’s Wager? Whereas Cyberkant can be thought of as using expected utility maximization to ground the categorical imperative, we can also explore doing it the other way round: Why maximize expected utility? Because it’s the best long-run policy. It’s also the best policy for groups of people to adopt. In general, expected utility maximization does great when applied over many independent choices… the many times in which high-risk, high-reward gambles fail are outweighed by the few times they succeed, and if you try sufficiently many times, the probability that some will succeed is high. This might also solve the problems arising from St. Petersburg and the Wager: Some gambles are so risky that the probability that at least one of them will succeed is still very low, even if every rational agent always took such gambles. Other gambles are correlated: If we all take Pascal up on his wager, is there a decent chance that at least one of us will win? No.
6.2. Justifying the Principal Principle and the Bland Indifference Principle:
There are different versions of the Principal Principle; I’m going to talk about this one:
fPCP: If we know what the frequency of A is, and all our background information is stochastically irrelevant, then we rationally should have credence in A equal to the frequency of A.
Strevens has argued that fPCP (and indeed many other versions of the Principal Principle) is impossible to justify. Think about it: The fact that the frequency of coin-tosses landing heads is 0.5 does not entail that this coin-toss will be heads, nor does it entail that it will be tails.
Meanwhile, many (most?) people in formal epistemology accept something like the following principle: (Bostrom 2003)
dBIP: If we know that A is true for a fraction x of all observers of our type, and we have no special information that makes A more or less likely, then we should set our credence in A to x.
If we adopt the Categorical Imperative for theoretical reason, perhaps we can justify something like dBIP and then from there justify fPCP. What follows is a sketch of this reasoning:
If we choose as if we are choosing on behalf of everyone—and if we furthermore choose so as to take into account the epistemic ends of everyone—then it seems we should set our credence in A to x. After all, A is true for fraction x of the total population, so if we are choosing which credence for everyone to have, the credence that maximizes total accuracy will be x. (10) Having thereby justified dBIP or something like it, we can justify a version of fPCP: If we know that the frequency of A happening for observers of our type is x, then… etc. For practical purposes this version of fPCP will be just as good as the real thing, because (arguably) the inductive evidence we get to support scientific claims like “Half of all tritium atoms decay within X years” is equally good evidence for the claim “Half of all tritium atoms that people in situations like ours are wondering about decay within X years.”
7.What Kant can learn from Cyberkant:
Possibly nothing. But here are two suggestions. First, a major difficulty in interpreting Kant (as with any great philosopher) is finding a way to reconstruct their arguments as valid and convincing. On the face of it Kant seems to be saying that morality can be deduced from rationality; this is a very implausible claim that motivates lots of exegesis on what he means by rationality and morality. Similarly, Kant seems to think that all three formulations of the Categorical Imperative are equivalent, which is also a very surprising claim. (436) I submit that we should consider interpreting Kant as Cyberkant, and see how far that gets us—it gets us a good deal of the way towards vindicating both of those surprising claims, for example.
Secondly, even if we think (as seems probable) that Kant was very different, the structural similarities can be used as a source of inspiration to solve problems for Kant. In particular, a common objection to Kant is that his theory collapses unless we have some way to rule out self-serving maxims like “All rational agents do what they think Daniel Kokotajlo wants them to do.” But how can we exclude these maxims in a non-ad-hoc way that also avoids undermining Kant’s justification for obeying the Categorical Imperative in the first place?
Cyberkant has a ready answer to this problem: It’s a fact that if I help other rational agents in need, other rational agents will help me in need. But it’s not a fact that if I help other rational agents named Daniel and ignore the rest, other rational agents will also help other rational agents named Daniel and ignore the rest. Why is the first If-then claim a fact and the other one not? Because that’s how our minds are structured; it’s a fact we know about the world. (11)
7. Conclusion
This paper is, admittedly, rather speculative. However, I think that the similarities highlighted here are intriguing enough to motivate further investigation. Even though Kant and Cyberkant are doubtless very different, they might be able to learn some things from each other. (12)
Another version: “Act as if the maxim of your action were to become through your will a universal law.” (421) This formulation is good for my purposes because, as we shall see, there is a sense in which your action does become a universal law, and decision-theoretic reasons to think that you should act accordingly.
I’m not sure the formal epistemology treatment will be able to match the additional meaning of end-in-itself that Kant seems to have, the meaning by which there are certain things you can’t do to somebody even if they & everyone else in the entire world wishes it to be done. That said, it’s not out of the question to interpret Kant as primarily concerned with the adopt-their-ends-as-your own version of this imperative, and thinking of everything else as derivative. This is the interpretation Geoff Sayre-McCord teaches his undergrads, for example, and I find textual support for it in 429 where Kant explains that each rational creature thinks of his own existence as an end–perhaps this is why everyone’s existence should be treated as an end.
Arguably evidential decision theory–the second-most-popular decision theory–thinks this way, though perhaps only as a special case of something even more general. Drescher, Soares & Fallenstein, and Oesterheld think this way. Doug Hofstadter and Chris Meacham seem attracted to it too. For Hofstadter, see https://en.wikipedia.org/wiki/Superrationality For the others, see the References.
This is where the “Cyber” in the title comes from.
Agents could reason using backwards induction: The most powerful won’t cooperate with anyone less powerful, and so the second-most powerful won’t cooperate with anyone less-powerful either, and so… everything falls apart.
For example, say there are 100 levels and the people on the top and bottom know it, but everyone else is clueless about their position. Each of the 98 people in the middle will reason: If I be nice to people less powerful than me, then all the people (except for the guy on top) will be nice to me, and so (unless I’m near the top, which is unlikely) I’ll benefit.
The game theory literature is full of reasons why being able to self-bind is useful. The decision theory literature has talked about this, too. (Meacham 2010)
Saves having to pay those binding costs.
This is true for standard measures of accuracy like the Brier score.
Originally I thought that Kant could straightforwardly solve the problem by engaging in a regress: In order to choose “Everyone does what Daniel wants” as my maxim, I’d have to first set myself the goal of finding a self-serving maxim, and that would not be universalizeable. However, it’s not strictly speaking true that I’d have to do that. We can imagine a possible world in which I choose “Everyone does what Daniel wants” as my maxim not via malice but out of some other motive or perhaps no motive at all, and in that world Kant would need to say that my action satisfied the Categorical Imperative.
Many thanks to Markus Kohl, Karl Adam, and Krasimira Filcheva for helpful discussion.
9. References
Bostrom, N. (2003) “Are you living in a computer simulation?” Philosophical Quarterly, Vol. 53, No. 211, pp. 243-255.
Drescher, G. (2006) Good and Real. MIT Press.
Kant, I. (1781) Critique of Pure Reason. Guyer and Wood translation. Cambridge University Press, 1998.
Kant, I. (1785) Grounding for the Metaphysics of Morals. J. Ellington translation. Hackett publishing company 1993.
Meacham, C. (2010)“Binding and its Consequences” Philosophical Studies, 149(1): 49–71, 2010.